







到达角(AoA)估算的基础
-
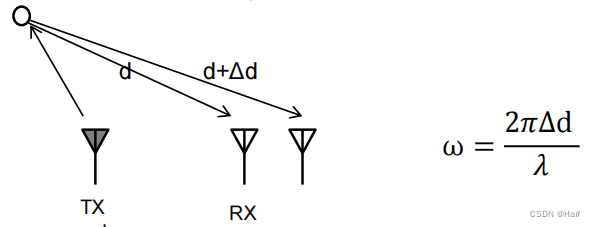
IF信号的相对物体距离的微小变化非常敏感,具体而言,物体距离的微小变化Δd会导致相位变化ω,其值为4𝜋Δd除以𝜆。角度估计也用了类似的概念。

-
角度估算需要至少两个RX天线。利用的是物体相对每个天线的差分距离,TX天线发射一个线性调频脉冲信号,一束射线从物体到达第一个RX天线,另一束设线从物体到达第二个RX天线,而到达第二个RX天线的射线传播稍远一点的距离,即额外的距离Δd,才能到达那里。这个额外的距离Δd会导致额外的相位ω它等于2𝜋Δd除以𝜆。
如何使用2个RX天线测量一个物体的AoA
-
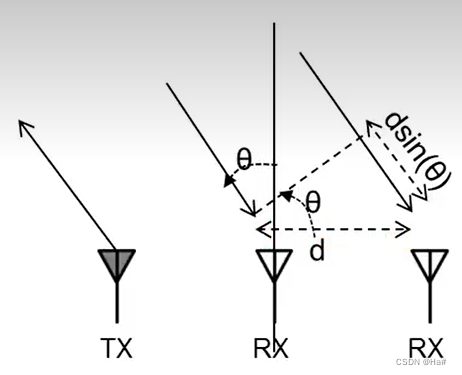
下图说明了额外距离与到达角的关系,如果与两个天线之间的距离d相比,物体足够远,从而可以假设从物体到达RX天线的射线是平行的。下图的d是两个天线之间的距离,𝛉是物体相对于雷达的达到角度,设线必须传播的该额外距离结果为dsin𝛉
-
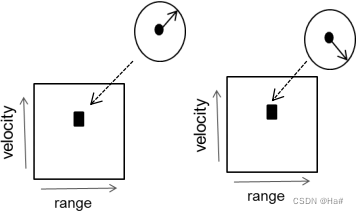
TX天线发射一个线性调频脉冲帧,每个RX天线会接收该数据,每个RX天线会处理该数据,并创建一个2D-FFT矩阵,其中包含与物体的距离和速度相对应的峰值,如下图所示,是与该接收器相对应的2D-FFT峰值,以及与该接收器相对应的另一个2D-FFT矩阵,峰值的位置将几乎与这两个2D-FFT相同,这两个峰值的相位差将为2𝜋dsin𝛉,dsin𝛉是额外的距离,然后除以𝜆。通过比较这两个到达信号峰值处的信号来测量的相位差之后,可以求该公式的反函数,并计算到达角。

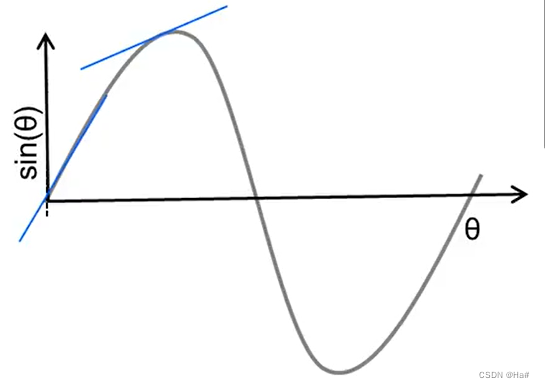
以上求出的𝛉,与测量出的相位差之间的关系是非线性的。在θ =0时,ω对θ的变化最为敏感。ω对𝛉的敏感性随着θ的增加而降低(在θ=90度时变成0),因此,随着θ值的增加,对θ值的估计更容易出错。
角视场,视角范围
-
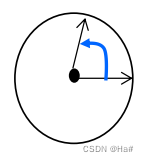
雷达左侧=> ω>0
-
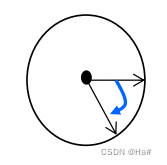
雷达右侧=> ω<0
-
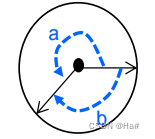
只要沿顺时针或逆时针方向方向的移动小于180度或pi弧度,对该移动的测量就是明确的

-
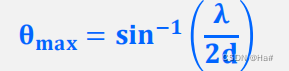
间隔为d的两个RX天线可提供服务的最大视场为(间距d为λ/2会导致视野最大)
在相同的范围和速度下测量多个物体的AoA
-
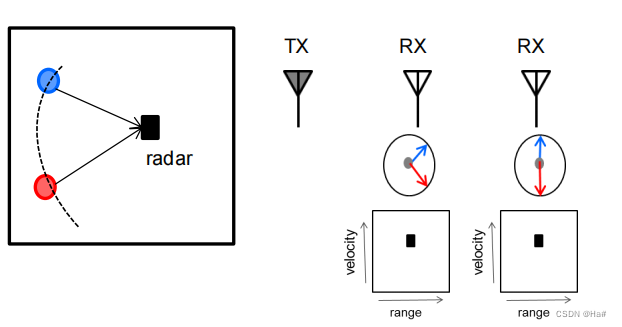
假如雷达前方的两个物体,它们相对于雷达有相同的距离和速度,这样这两个物体将处于2D-FFT中相同的距离速度单元,峰值处的值具有来自这两个对象的相量分量。前面所使用的简单相位比较技术不再适用。
-
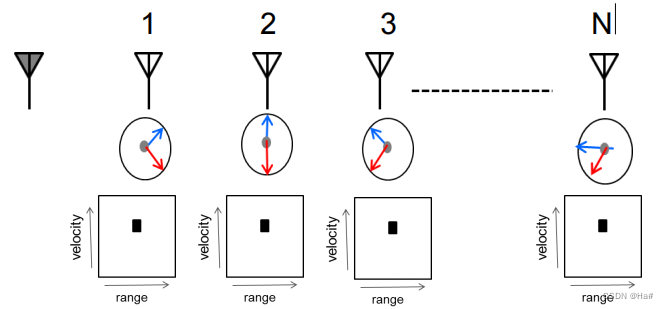
解决方法:将RX天线的数量从两个增加到N个,并创建N个接收天线的区域,所有这些天线处的二维FFT将在同一个位置具有一个峰值,该系列峰值处的信号将创建一个包含两个旋转相位的离散序列,该序列上的FFT将显示为𝝎1和𝝎2处的两个峰值,其中𝝎1和𝝎2是两个物体的旋转速度,以每个样本的弧度数为单位,就可以通过FFT读取这两个峰值的出现位置,然后计算两个物体的到达角。
![]()


















 1904
1904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











