 永磁同步电机前馈解耦控制
永磁同步电机前馈解耦控制





在采用传统无动态解耦控制时,uqu_quq和udu_dud的指令值存在耦合项。上一个学习笔记中设计的设计方法是将其忽略,因此在最后设计的效果并不太好。目前,常用的解耦设计方法,有前馈解耦、偏差解耦以及内模控制。
采用前馈解耦方法
由电机在旋转坐标系下的数学模型可以得到uqu_quq和udu_dud表达式:
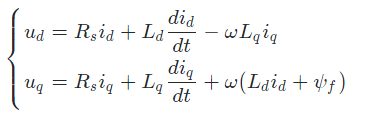
对其取拉氏变换,得到

由此可以画出电机模型的传递函数:
在永磁同步电机的矢量控制系统中,对转矩的控制实际上就是对idi_did和iqi_qiq的控制,而对电流的控制实际上是对udu_dud和uqu_quq的控制。由上图可以看出,PMSM的d、qd、qd、q轴之间存在耦合项,如果不进行处理,会影响系统的控制效果。
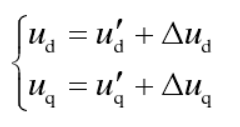
前馈解耦的思想,是对D轴和Q轴分别进行补偿,控制图如下: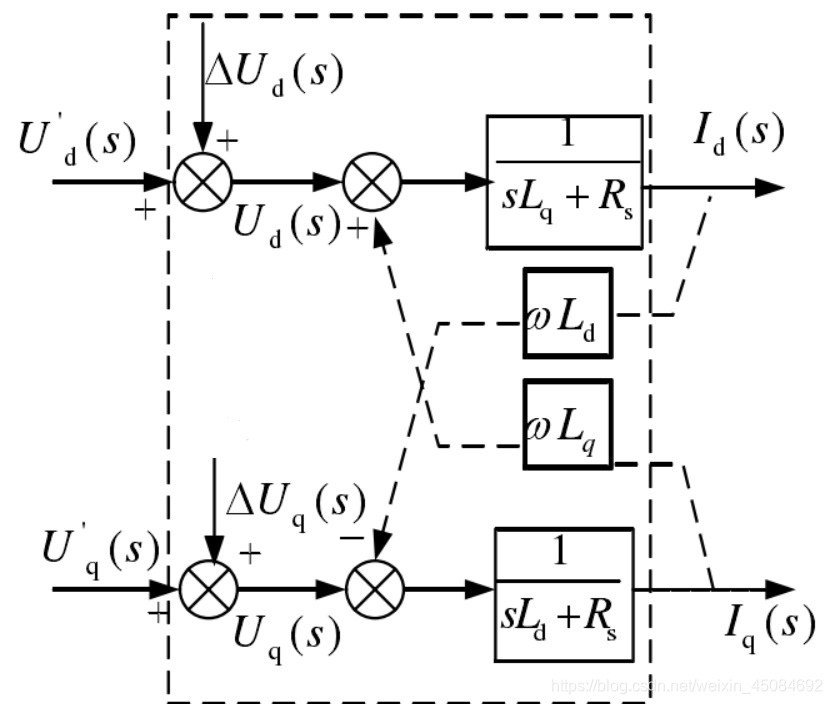 将电压方程改写为如下,其中ud′、uq′u_d'、u_q'ud′、uq′为补偿后的电压,互相之间没有耦合关系:
将电压方程改写为如下,其中ud′、uq′u_d'、u_q'ud′、uq′为补偿后的电压,互相之间没有耦合关系:
上式中:
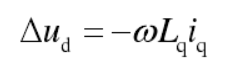
式中的ω\omegaω为电气角速度。此处采用前馈解耦,式中的id、iqi_d、i_qid、iq为电流指令值。如果是采用反馈解耦,则为id、iqi_d、i_qid、iq为电机的实际值。
于是可以求得:
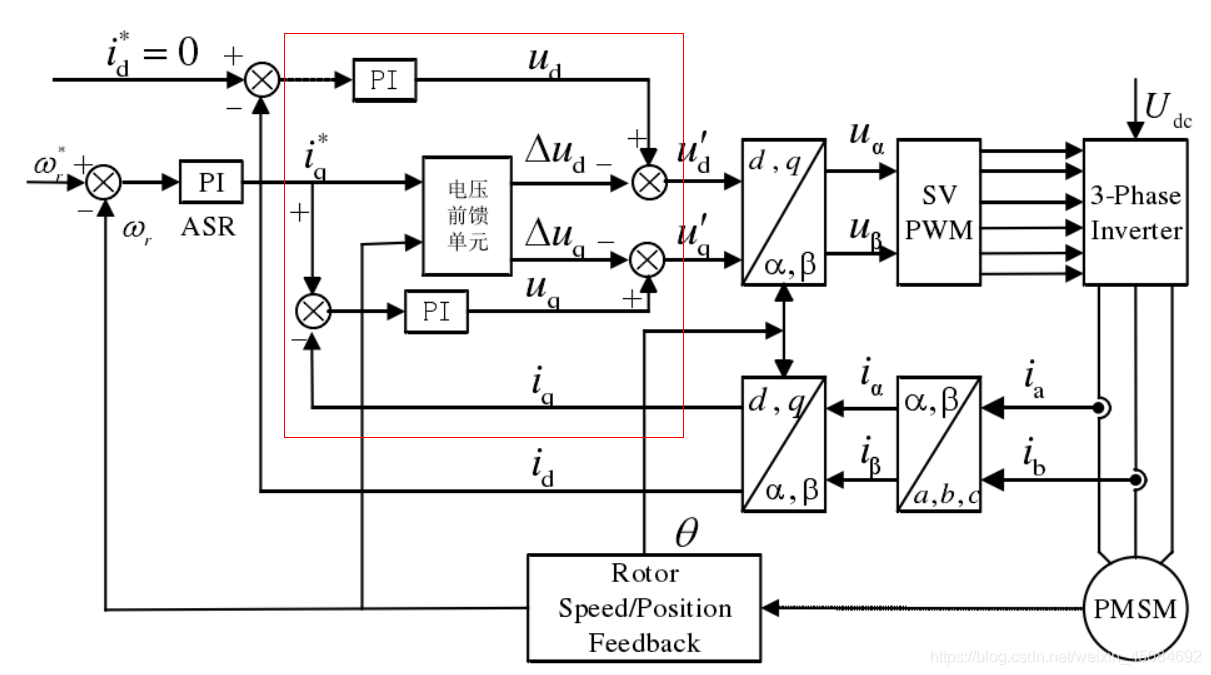
再利用传统PI控制器的设计方法来设计参数,理论上效果要好一些。那么要在控制电路中添加前馈解耦的模块:

















 7487
7487

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









