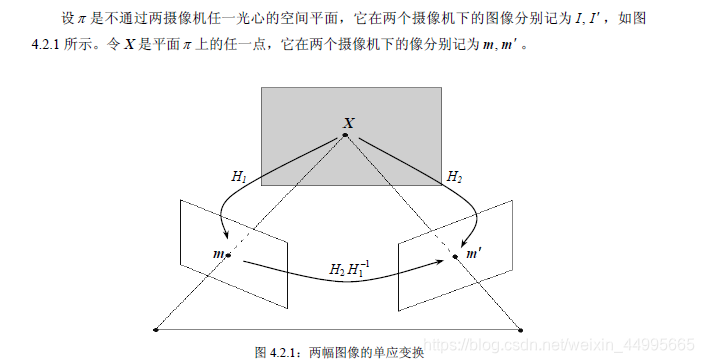
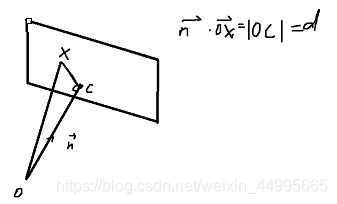
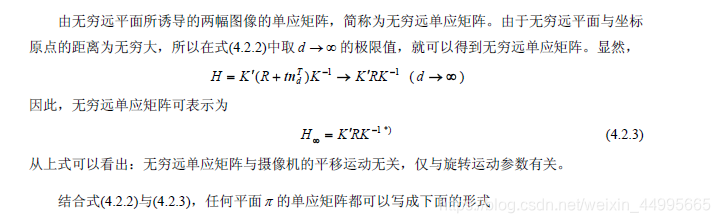
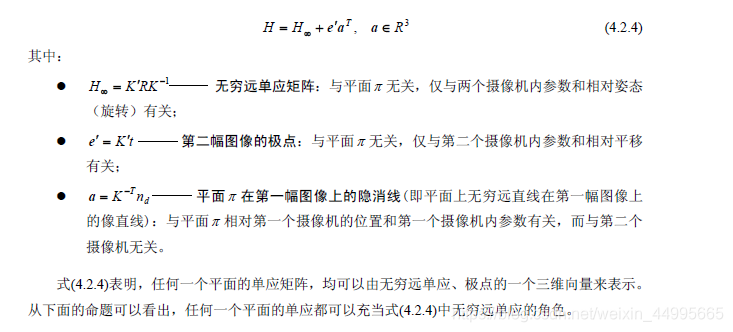
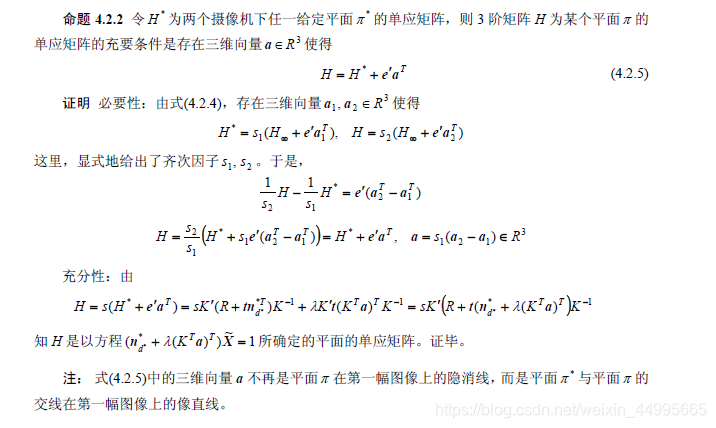
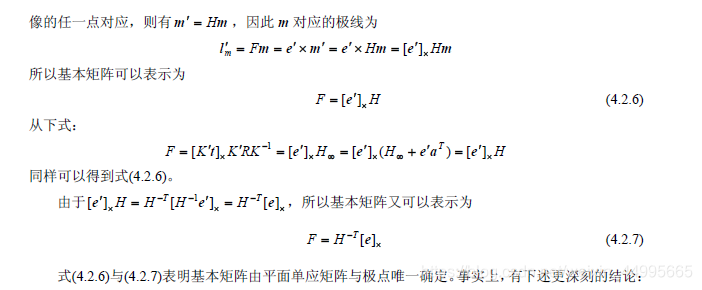
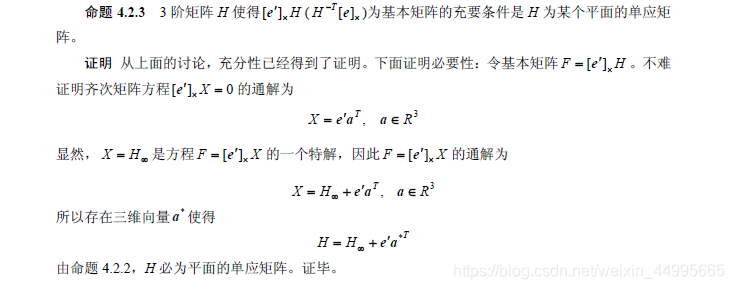
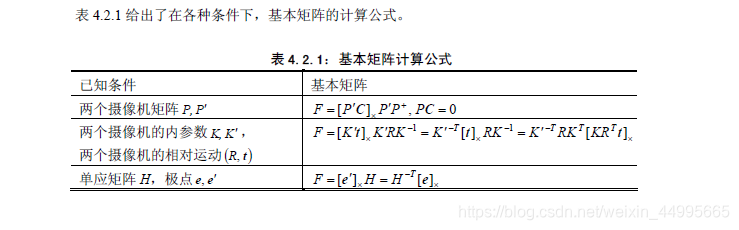
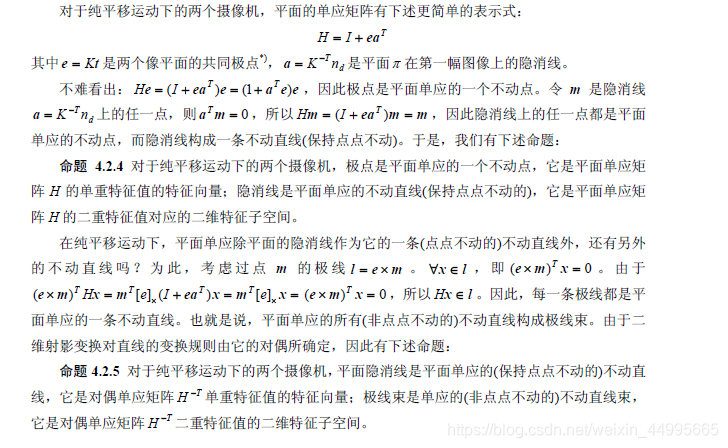
4.2 单应矩阵 4.2.1 单应矩阵无穷远单应(无穷远平面所诱导) 4.2.2 单应矩阵与基本矩阵的关系各种条件下的基本矩阵计算公式 4.2.3 不动点与不动线纯平移运动 相对单应矩阵 4.2.1 单应矩阵 两幅图像单应变换 极点单应变换 平面π诱导的两个摄像机间的单应矩阵 对于单应矩阵的代数表示,有下述命题: 无穷远单应(无穷远平面所诱导) 将4.2.2展开得到 t为在第二个坐标系下的相对平移,所以只需内参数即可。 t的新理解:在第二个相机坐标系下,第一个相机的坐标位置。 注意a意义的变化 4.2.2 单应矩阵与基本矩阵的关系 各种条件下的基本矩阵计算公式 4.2.3 不动点与不动线 纯平移运动 He这里的不动点是隐去了齐次因子 相对单应矩阵 应该是命题4.2.2(公式4.2.5)































 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 1万+
496
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
1万+
496
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






