




3D-2D: PnP ——SLAM14讲内容
背景
PnP(Perspective-n-Point)是求解3D 到2D 点对运动的方法。它描述了当我们知道n个3D空间点以及它们的投影位置时,如何估计相机所在的位姿。
PnP 问题有很多种求解方法,例如用三对点估计位姿的P3P[45],直接线性变换(DLT),EPnP(Efficient PnP)[46],UPnP[47] 等等)。此外,还能用非线性优化的方式,构建最小二乘问题并迭代求解,也就是万金油式的Bundle Adjustment。我们先来看DLT,然后再讲Bundle Adjustment。
直接线性变换DLT
考虑某个空间点P,它的齐次坐标为
此时相机的位姿R; t 是未知的。图像I1 中,投影到特征点

归一化平面:f=1
我们定义增广矩阵![[Rjt]](https://i-blog.csdnimg.cn/blog_migrate/32fc2e66bb3c9ef53b570f6ef211b84c.png) 为一个3 x 4 的矩阵,包含了旋转与平移信息
为一个3 x 4 的矩阵,包含了旋转与平移信息


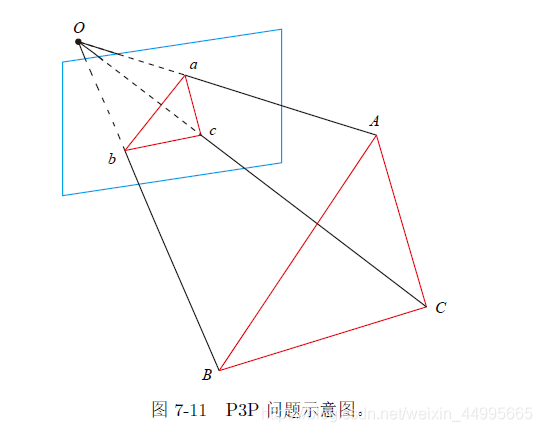
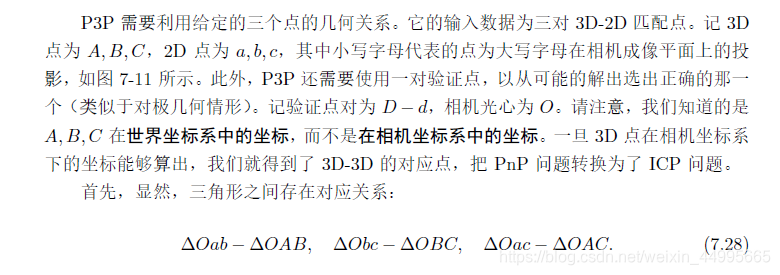
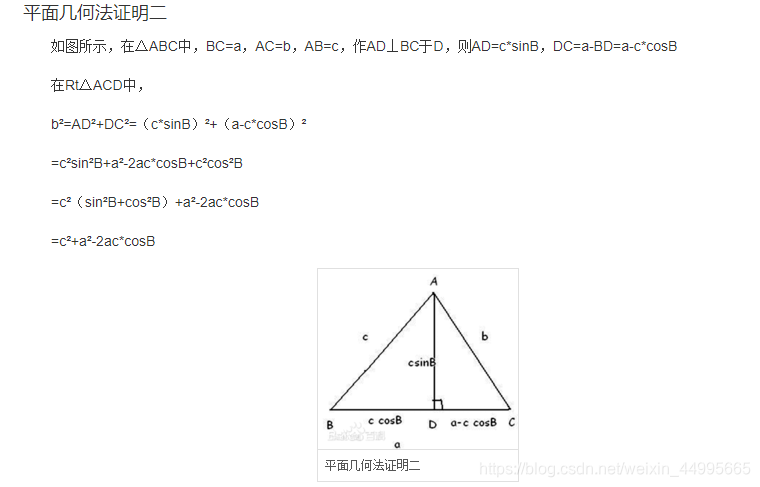
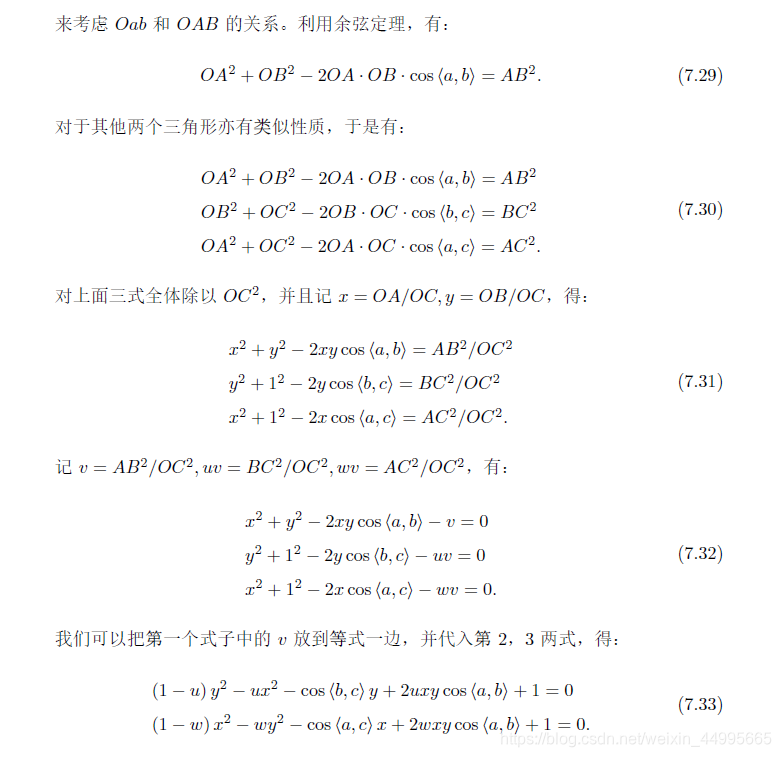
P3P

Bundle Adjustment
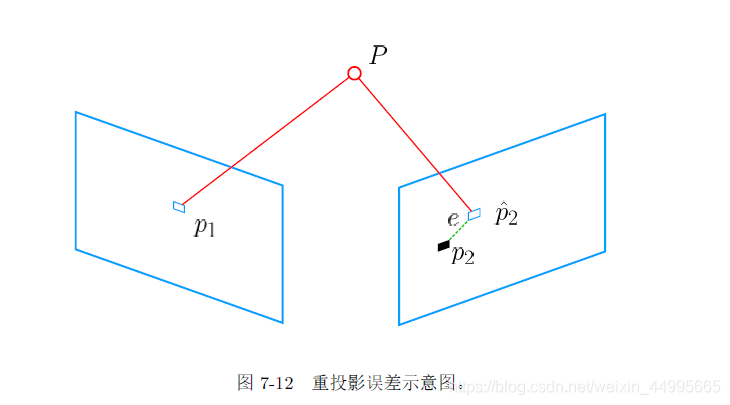
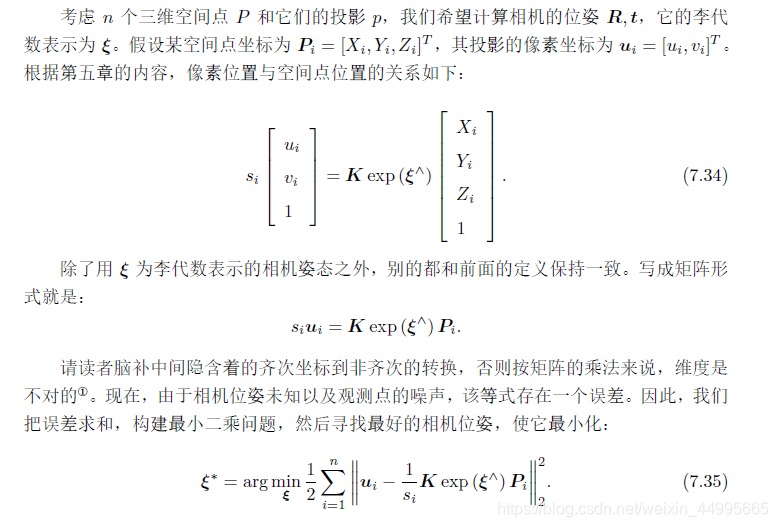
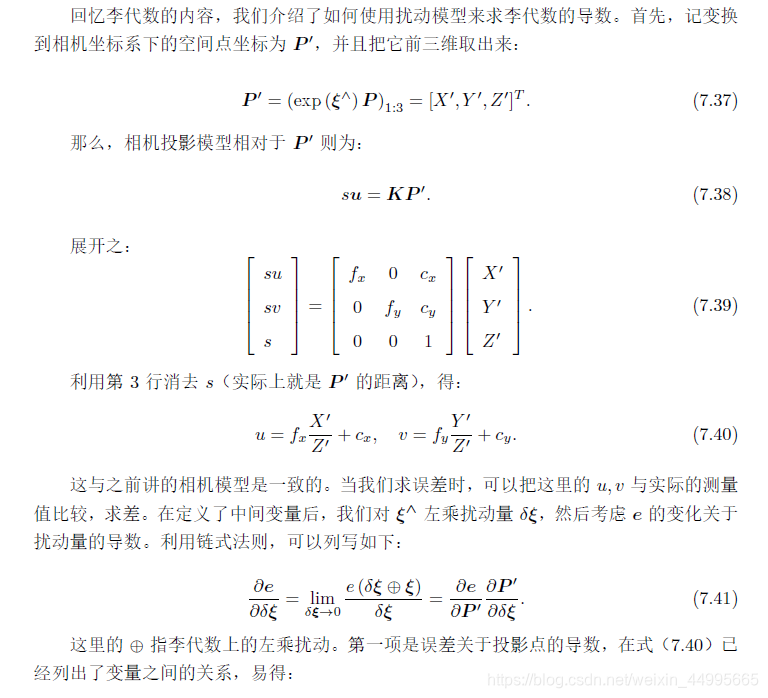
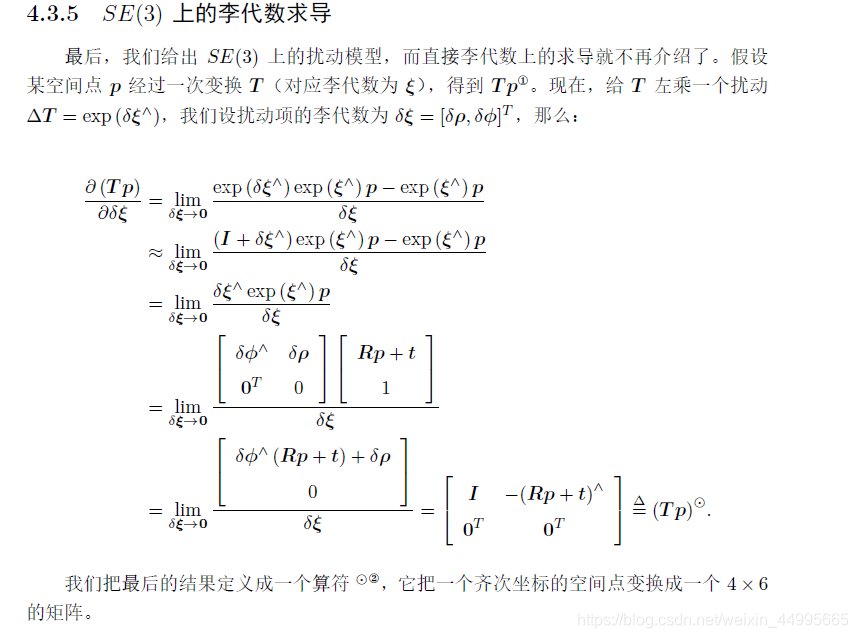
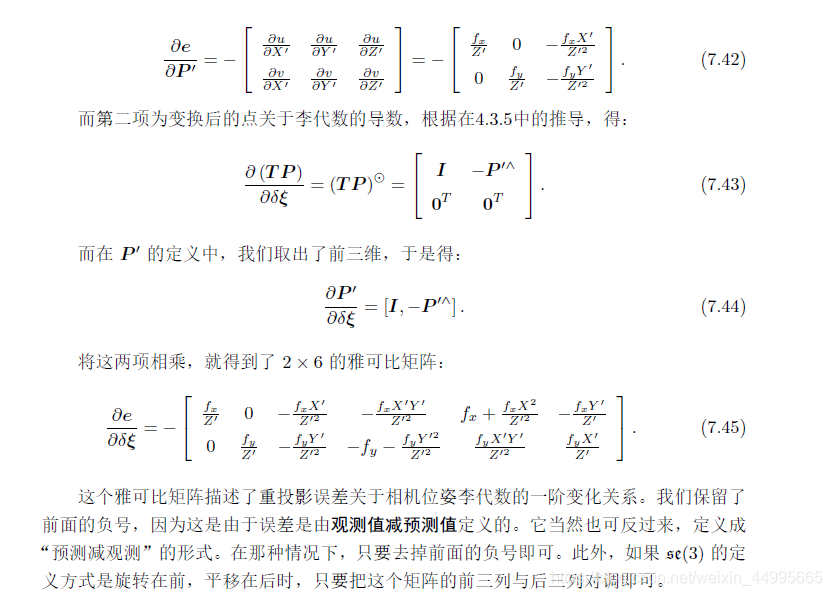
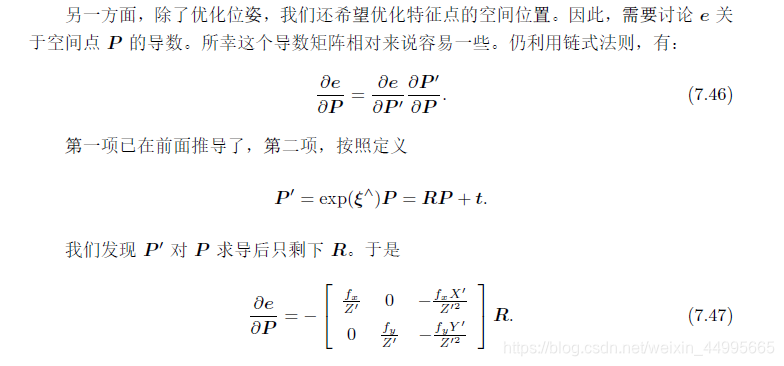
除了使用线性方法之外,我们可以把PnP 问题构建成一个定义于李代数上的非线性最小二乘问题。前面说的线性方法,往往是先求相机位姿,再求空间点位置,而非线性优化则是把它们都看成优化变量,放在一起优化。这是一种非常通用的求解方式,我们可以用它对PnP 或ICP 给出的结果进行优化。在PnP 中,这个Bundle Adjustment 问题,是一个最小化重投影误差(Reprojection error)的问题。我们在本节给出此问题在两个视图下的基本形式,然后在第十讲讨论较大规模的BA问题。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









