







 本文对比了ROS1与ROS2在机器人操作系统中的区别,主要聚焦于中间件层的优化,如去中心化的master节点、采用DDS通信提高实时性和可靠性,以及应用层的改进,包括Python3支持、编译系统升级和C++11软件包更新等。
本文对比了ROS1与ROS2在机器人操作系统中的区别,主要聚焦于中间件层的优化,如去中心化的master节点、采用DDS通信提高实时性和可靠性,以及应用层的改进,包括Python3支持、编译系统升级和C++11软件包更新等。
一、ROS1 与 ROS2 对比
ROS的设计目的是简化在各种机器人平台上创建复杂而强大的机器人行为的任务
既然ROS已经基本解决了这个问题,那么为什么还有ROS2呢?
1、ROS虽然将各个部分的各个组件给有机的连接起来,但是需要通过一个叫做Ros Master的东西,所有节点(可以理解为某一个组件,比如:激光雷达)的通信建立必须经过这个主节点,一旦Ros Master主节点挂掉后,就会造成整个系统通信的异常。
2、通信基于TCP实现,实时性差、系统开销大
3、对Python3支持不友好,需要重新编译
4、消息机制不兼容
5、没有加密机制、安全性不高
二、ROS1 与 ROS2架构对比
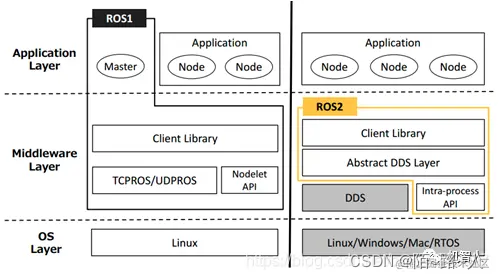
可以非常直观的看出,ROS2将ROS1的主节点干掉了,而且支持的操作系统也变多了。
三、中间件层(MiddleWare)
1、什么是中间件
官方解释:
中间件是一种独立的系统软件或
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









