









 本文介绍了使用PCL库通过分层切片法来精确计算树冠投影面积的方法。首先,概述了算法原理,然后详细说明了包括设置切片层数、计算层高等步骤,接着展示了代码实现和实验效果。最后,对算法使用时的注意事项进行了总结,强调了点云层数不宜过多以及投影面积计算可采用二维凸包算法。
本文介绍了使用PCL库通过分层切片法来精确计算树冠投影面积的方法。首先,概述了算法原理,然后详细说明了包括设置切片层数、计算层高等步骤,接着展示了代码实现和实验效果。最后,对算法使用时的注意事项进行了总结,强调了点云层数不宜过多以及投影面积计算可采用二维凸包算法。
一、算法介绍
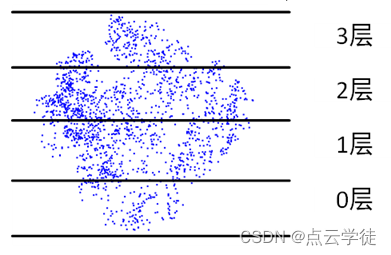
在上一节中,通过树冠整体投影到同一水平面后,计算凸包面积,粗略估计了树冠投影面积,但在通常的研究学习中,这种方法较为笼统,大部分的树冠投影面积计算是通过将整个树冠分层切片后,逐一计算比较切片点云面积,将最大面积作为树冠投影面积,这一计算结果相对更合理准确,但其计算过程稍微复杂一些,这里对此进行实现,具体的实现方法和代码,以及效果如下所示意:
二、方法流程
1、人工选择切片层数,预设置点云容器
2、计算点云高程最值,最大与最小
3、根据高差和切片数量,计算层高
4、遍历点云,依次确定每个点的所在层数,放入对应容器
5、使用二维凸包面积计算,对每层点云进行面积计算
6、比较确定最大面积,作为最终的投影面积
三、具体实验
1.代码
#include <pcl/io/
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 6064
6064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











