







欧拉角与固定角的区别
在三维空间中,旋转的表示方式有很多,其中 欧拉角(Euler Angles) 和 固定角(Fixed Angles) 是两种常见的方法。虽然它们都使用三个角度来描述旋转,但在定义和应用上存在显著区别。本文将详细探讨欧拉角与固定角的概念、区别以及使用场景。
1. 欧拉角(Euler Angles)
欧拉角由 瑞士数学家莱昂哈德·欧拉(Leonhard Euler) 提出,是一种通过三个旋转角度描述刚体方向的方法。它的特点是 旋转轴是相对自身变换的,即 旋转是关于“移动的坐标轴”进行的。
1.1 欧拉角的定义
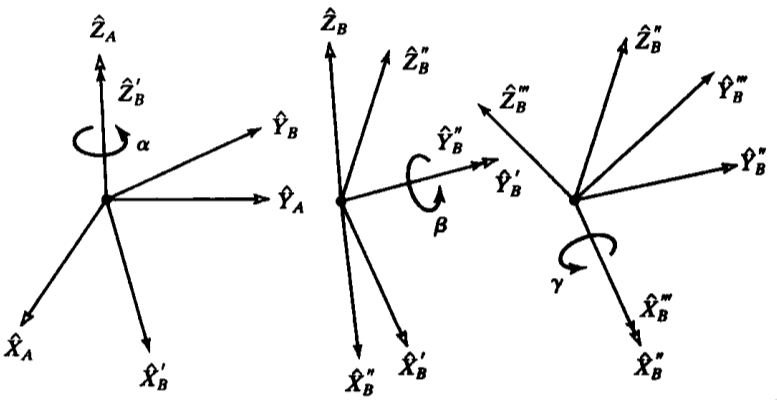
欧拉角的旋转顺序通常为 ZYX、ZYZ 或其他组合,具体定义如下:
- 绕固定的 Z 轴旋转,角度为 ψ(偏航 Yaw)。
- 绕新(旋转后)的 Y 轴旋转,角度为 θ(俯仰 Pitch)。
- 绕新(旋转后)的 X 轴旋转,角度为 ϕ(翻滚 Roll)。
这个顺序称为 ZYX 欧拉角,不同领域可能使用不同的顺序。
1.2 欧拉角的特点
- 旋转轴随变换而变化(非固定)。
- 容易出现万向锁(Gimbal Lock)问题:当俯仰角 θ 变为 ±90度时,系统会失去一个自由度,使得两个旋转轴重合,导致某些旋转无法表示。
- 适用于航空航天和机器人学,但在某些情况下不够稳定。
2. 固定角(Fixed Angles)
固定角与欧拉角的核心区别在于:固定角是绕“固定坐标系”的轴进行旋转,即 旋转轴在整个变换过程中保持不变。
2.1 固定角的定义
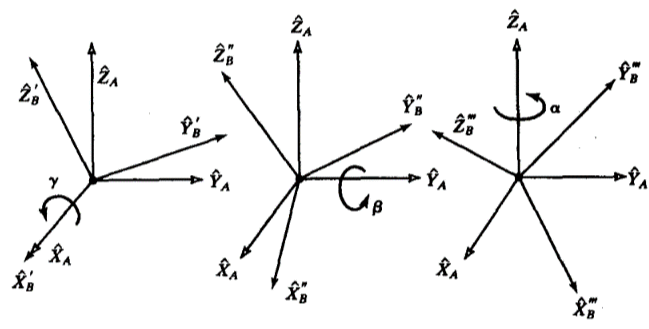
假设采用 XYZ 固定角旋转顺序,则旋转如下:
- 绕固定的 X 轴旋转,角度为 γ。
- 绕固定的 Y 轴旋转,角度为 β。
- 绕固定的 Z 轴旋转,角度为 α。
与欧拉角的区别 在于,这些旋转始终是相对于最初的固定坐标轴进行的,而不是相对于旋转后的新坐标轴。
2.2 固定角的特点
- 旋转轴不变(始终是固定坐标系的轴)。
- 相对于世界坐标系进行变换,而非局部坐标系。
- 适用于某些机械控制和数学分析,但在动态系统中应用较少。
3. 欧拉角 vs. 固定角的核心区别
| 特性 | 欧拉角(Euler Angles) | 固定角(Fixed Angles) |
|---|---|---|
| 旋转轴 | 旋转后改变 | 旋转后不变 |
| 旋转参考系 | 相对于局部坐标系 | 相对于固定坐标系 |
| 常见顺序 | ZYX、XYZ 等 | XYZ、ZYX 等 |
| 万向锁问题 | 可能出现 | 可能出现 |
| 应用领域 | 计算机图形学、机器人学、飞行器姿态 | 机械系统、数学分析 |
4. 结论
欧拉角和固定角都用于表示三维旋转,核心区别在于旋转轴是否随变换改变。欧拉角适用于动态系统,如飞机和机器人,而固定角更适用于机械控制和静态数学计算。在实际应用中,若要避免万向锁问题,常常使用 四元数(Quaternion) 作为替代方案。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









