






 该博客介绍了如何利用dlib库和OpenCV库进行人脸检测与特征点识别,通过编程实现68个特征点的定位,并展示了一个实时在人脸画出68个特征点的例子。此外,还详细讲解了如何在识别出的眼部特征点基础上,使用OpenCV绘制墨镜,实现给人脸虚拟佩戴墨镜的效果。
该博客介绍了如何利用dlib库和OpenCV库进行人脸检测与特征点识别,通过编程实现68个特征点的定位,并展示了一个实时在人脸画出68个特征点的例子。此外,还详细讲解了如何在识别出的眼部特征点基础上,使用OpenCV绘制墨镜,实现给人脸虚拟佩戴墨镜的效果。
目录
一、相关概念及安装
1.dlib库
Dlib是一个包含机器学习算法的C++开源工具包。Dlib可以帮助您创建很多复杂的机器学习方面的软件来帮助解决实际问题。目前Dlib已经被广泛的用在行业和学术领域,包括机器人,嵌入式设备,移动电话和大型高性能计算环境。
1)使用命令查看当前安装的python版本
python --version
2)安装对应版本的dlib库
pip install dlib-19.19.0-cp38-cp38-win_amd64.whl2.open-cv库
OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux、Windows、Android和Mac OS操作系统上。它轻量级而且高效——由一系列 C 函数和少量 C++ 类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
1)使用pip安装即可
pip install opencv_python==3.4.11.45二、人脸特征点识别
以人脸识别(属于分类问题)为例,理解实际应用中的特征数据集提取。
用python3+opencv3.4+dlib库编程,打开摄像头,实时采集人脸并保存、绘制68个特征点。
import numpy as np
import cv2
import dlib
import os
import sys
import random
# 存储位置
output_dir = 'D:/1/python/faces'
size = 64
if not os.path.exists(output_dir):
os.makedirs(output_dir)
# 改变图片的亮度与对比度
def relight(img, light=1, bias=0):
w = img.shape[1]
h = img.shape[0]
#image = []
for i in range(0,w):
for j in range(0,h):
for c in range(3):
tmp = int(img[j,i,c]*light + bias)
if tmp > 255:
tmp = 255
elif tmp < 0:
tmp = 0
img[j,i,c] = tmp
return img
#使用dlib自带的frontal_face_detector作为我们的特征提取器
detector = dlib.get_frontal_face_detector()
# 打开摄像头 参数为输入流,可以为摄像头或视频文件
camera = cv2.VideoCapture(0)
#camera = cv2.VideoCapture('C:/Users/CUNGU/Videos/Captures/wang.mp4')
ok = True
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('D:/1/python/shape_predictor_68_face_landmarks.dat')
while ok:
# 读取摄像头中的图像,ok为是否读取成功的判断参数
ok, img = camera.read()
# 转换成灰度图像
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
rects = detector(img_gray, 0)
for i in range(len(rects)):
landmarks = np.matrix([[p.x, p.y] for p in predictor(img,rects[i]).parts()])
for idx, point in enumerate(landmarks):
# 68点的坐标
pos = (point[0, 0], point[0, 1])
print(idx,pos)
# 利用cv2.circle给每个特征点画一个圈,共68个
cv2.circle(img, pos, 2, color=(0, 255, 0))
# 利用cv2.putText输出1-68
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(img, str(idx+1), pos, font, 0.2, (0, 0, 255), 1,cv2.LINE_AA)
cv2.imshow('video', img)
k = cv2.waitKey(1)
if k == 27: # press 'ESC' to quit
break
camera.release()
cv2.destroyAllWindows()
运行结果:

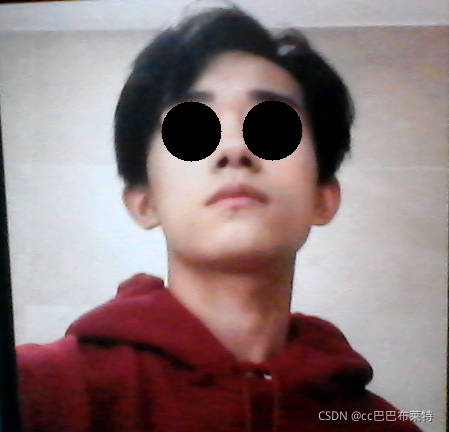
三、给人脸虚拟P上一副墨镜
核心思想:找到双眼特征点坐标值,以坐标中心点为圆心,用opencv函数绘制两个圆,并填充黑色。
# 导入包
import numpy as np
import cv2
import dlib
import os
import sys
import random
def get_detector_and_predicyor():
#使用dlib自带的frontal_face_detector作为我们的特征提取器
detector = dlib.get_frontal_face_detector()
"""
功能:人脸检测画框
参数:PythonFunction和in Classes
in classes表示采样次数,次数越多获取的人脸的次数越多,但更容易框错
返回值是矩形的坐标,每个矩形为一个人脸(默认的人脸检测器)
"""
#返回训练好的人脸68特征点检测器
predictor = dlib.shape_predictor('D:/1/python/shape_predictor_68_face_landmarks.dat')
return detector,predictor
#获取检测器
detector,predictor=get_detector_and_predicyor()
def painting_sunglasses(img,detector,predictor):
#给人脸带上墨镜
rects = detector(img_gray, 0)
for i in range(len(rects)):
landmarks = np.matrix([[p.x, p.y] for p in predictor(img,rects[i]).parts()])
right_eye_x=0
right_eye_y=0
left_eye_x=0
left_eye_y=0
for i in range(36,42):#右眼范围
#将坐标相加
right_eye_x+=landmarks[i][0,0]
right_eye_y+=landmarks[i][0,1]
# 取眼睛的中点坐标
pos_right=(int(right_eye_x/6),int(right_eye_y/6))
"""
利用circle函数画圆
函数原型
cv2.circle(img, center, radius, color[, thickness[, lineType[, shift]]])
img:输入的图片data
center:圆心位置
radius:圆的半径
color:圆的颜色
thickness:圆形轮廓的粗细(如果为正)。负厚度表示要绘制实心圆。
lineType: 圆边界的类型。
shift:中心坐标和半径值中的小数位数。
"""
cv2.circle(img=img, center=pos_right, radius=30, color=(0,0,0),thickness=-1)
for i in range(42,48):#左眼范围
#将坐标相加
left_eye_x+=landmarks[i][0,0]
left_eye_y+=landmarks[i][0,1]
#取眼睛的中点坐标
pos_left=(int(left_eye_x/6),int(left_eye_y/6))
cv2.circle(img=img, center=pos_left, radius=30, color=(0,0,0),thickness=-1)
camera = cv2.VideoCapture(0)#打开摄像头
ok=True
# 打开摄像头 参数为输入流,可以为摄像头或视频文件
while ok:
ok,img = camera.read()
# 转换成灰度图像
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#display_feature_point(img,detector,predictor)
painting_sunglasses(img,detector,predictor)#调用画墨镜函数
cv2.imshow('video', img)
k = cv2.waitKey(1)
if k == 27: # press 'ESC' to quit
break
camera.release()
cv2.destroyAllWindows()
运行结果:
参考博文:

















 3108
3108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









