







1、yolo3输出中心点坐标:
在/darkent/src/目录下:
image.c文件的draw_detections函数添加:
//draw_location*********************
float centra_x=(left+right)/2;
float centra_y=(top+bot)/2;
printf("X = %d,Y = %d\n",centra_x,centra_y);
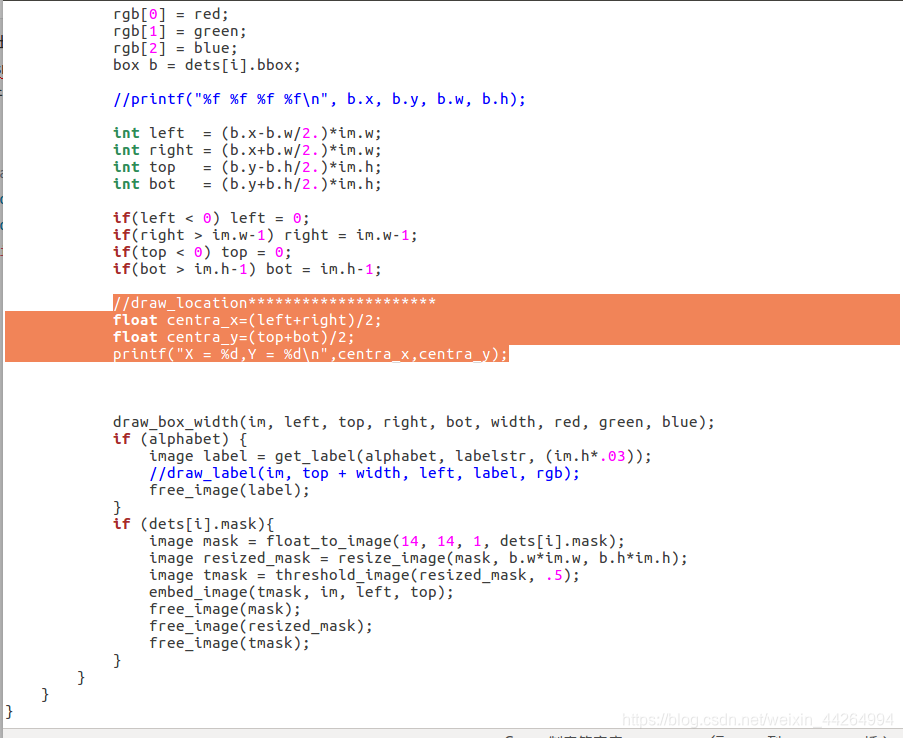 屏蔽掉:
屏蔽掉:draw_label(im, top + width, left, label, rgb);可以不显示类别
2、运行roskcf编译过程中出现
 No rule to make target ‘/opt/ros/kinetic/lib/libopencv_’, needed by…
No rule to make target ‘/opt/ros/kinetic/lib/libopencv_’, needed by…
问题出在路径上:打开
发现这个地方的路径中间少了一块:补上如下

再编译就好啦
参考:https://blog.youkuaiyun.com/gbz3300255/article/details/90440325


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









