







最近在项目开发中,涉及到气泵的相关控制,在这里进行比较系统的学习。对交直流气泵区别进行一个说明 ,同时了解一下单向和双向可控硅,最后根据项目实例进行了解。因为个人比较偏软件,有什么不对的地方欢迎指正。
一交流泵和直流泵
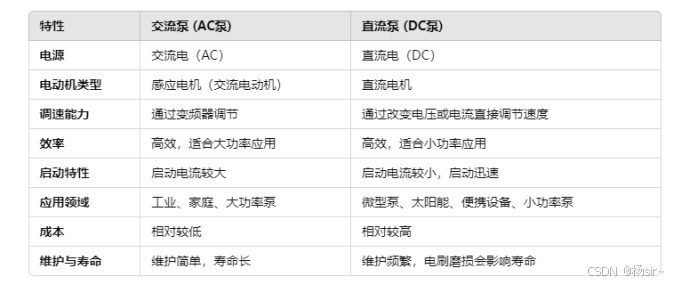
1电源类型
<1>交流泵(AC泵)
使用交流电源(AC),通常是家庭或工业电网提供的电压(如220V AC或110V AC)。交流电压的方向会周期性地改变,泵的电机也会随之变化方向和速度(对于感应电机,电流与电压同步变化)。
<2>直流泵(DC泵)
使用直流电源(DC),通常是电池、太阳能或直流电源适配器提供的电压(如12V、24V DC)。
直流电源的电流方向是固定的,因此电动机也会按固定方向转动。
2总结
二单向和双向可控硅
在项目中交流泵的控制用到了双向可控硅对交流电进行斩波,因此先了解一下单双向可控硅的原理
1触发原理
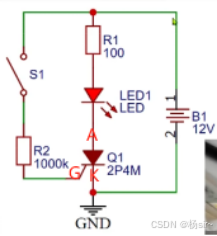
下图中为一个单向可控硅2P4M,K是负极、A是正极、G栅极。
如果S1不闭合可控硅是截止的,当S1闭合在断开后,可控硅导通,右侧电路开始工作。想要工作结束,只能将12V电源断开或者将可控硅的A和K引脚短路。根据这个可以知道单向可控硅的工作原理以及触发方式。
2双向可控硅以及四象限触发
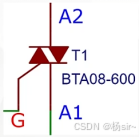
<1>经典双向可控硅举例
BTA08-600C 可以通过8A的电流,双向电压耐压600V。

<2>双向可控硅四象限触发实验
(1)看横坐标会发现第一、四象限中的G脚相对于A1为正电压(G连接了电源正极,A1连接了电源负极),第二、三象限正相反。
(2)看纵坐标会发现第一、二象限中的A2引脚相对于A1为正电压(A2连接了电源正极,A1连接了电源正极),第三、四象限正相反。

在第二、第三象限触发会比较稳定,当在第一、第四象限触发的时候会没有那么稳定。
一般称为触发不彻底。
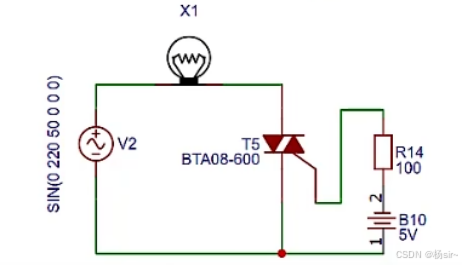
<3>双向可控硅工作举例说明
当5V闭合在断开后,可控硅导通,X1点亮,当V2停止供电以及可控硅A1、A2短路时,可控硅截止,电路不在导通。
三交流泵实例
下图为项目中气泵控制的相关电路
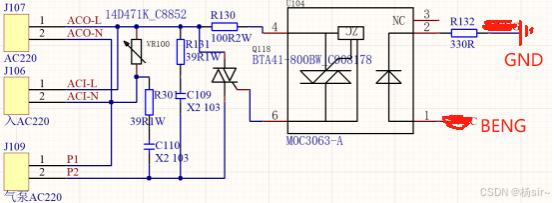
1上图为可控硅斩波控制电路
<1>右侧BENG引脚连接单片机PWM输出引脚
为高电平时,右侧导通,左侧实现斩波功能,斩波后产生的信号控制气泵工作。
<2>左侧从上到下分别为交流220V以及控制气泵引脚
2斩波
<1>原理:通过改变控制信号一个周期内高低电平的占空比对市电进行斩波。需要注意的是控制信号的周期必须为100Hz。斩波时序如下:
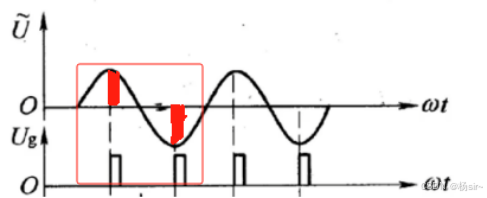
<2>交流220V50Hz未斩波前的信号交流220V50Hz未斩波前的信号
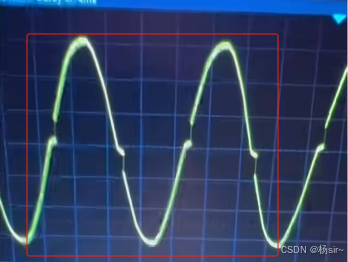
<3>斩波后的信号,这就是最终输入给气泵的信号

<4>对原理在进行从头到尾的解释
首先右侧的Beng是单片机的引脚,当为高电平时,光耦导通,相当于双向可控硅的栅极导通,这样双向可控硅就开始进行斩波工作。
双向可控硅的控制理解为,一方面光耦导通,进行斩波。一方面为过零停止工作。也就是说光耦不导通不工作,光耦导通工作,遇到过零点就停止工作。
通过对原理的说明结合上面的图就可以搞明白为什么最终的波形输出是这样的。
四项目说明
本次开发的项目因为没有调档的需求,因此将Beng引脚一直处于高电平就可以了,相当于原始信号百分百使用了,应该是可以这样理解。如果设备需要调档,那么一方面需要调 PWM波,一方面还需要过零检测很多时候,因为信号的相位会发生偏移,这些内容在后续学习中遇到在做修改,因为工作方向偏软件,有什么不对的地方欢迎指点。


















 2492
2492

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









