







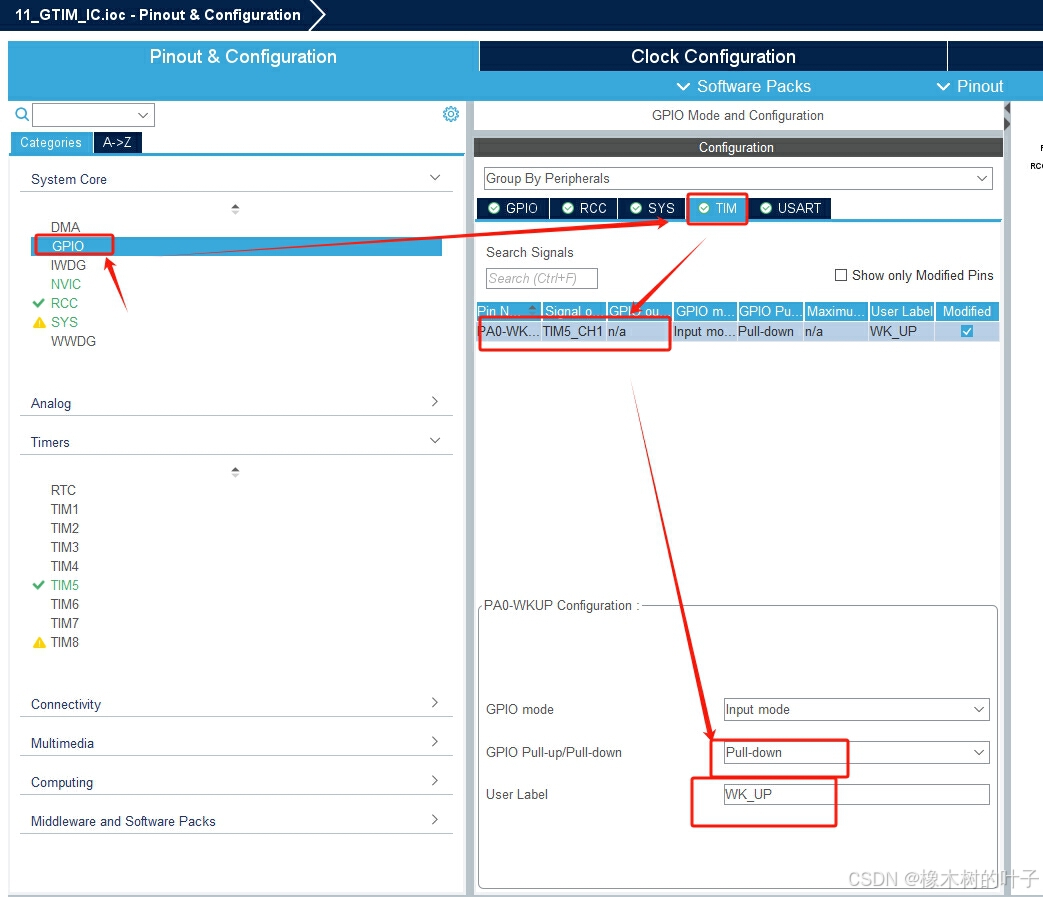
使用的是正点原子的精英版,单片机是STM32F103ZET6,目的:通过TIM5 CH1(PA0)来捕获按键KEY_UP高电平脉宽时间,通过串口打印出来。
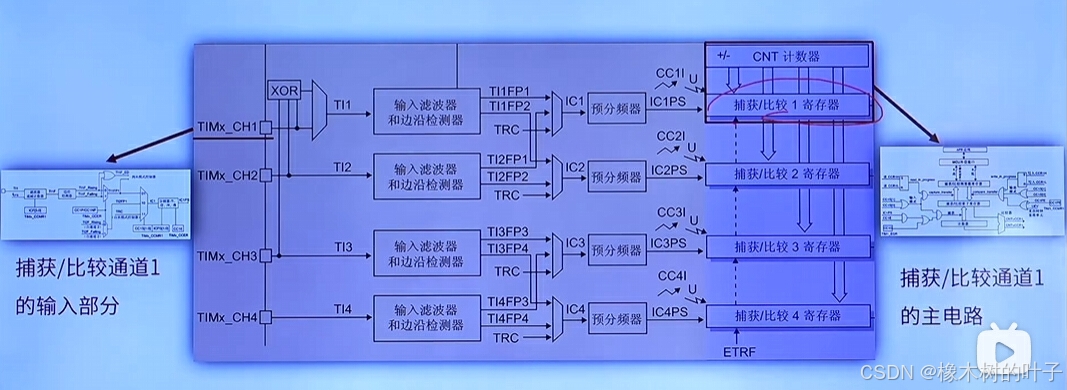
通用定时器输入捕获框图
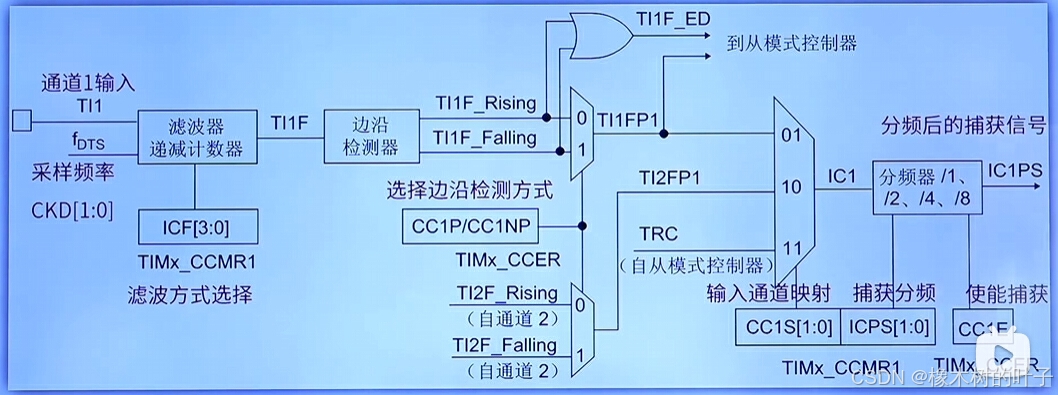
捕获/比较通道的输入部分(通道1)
捕获/比较通道1的主电路---输入部分 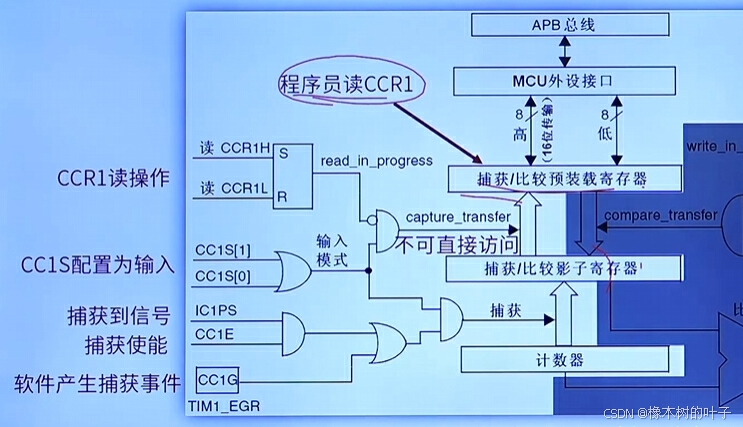
通用定时器输入捕获脉宽测量原理 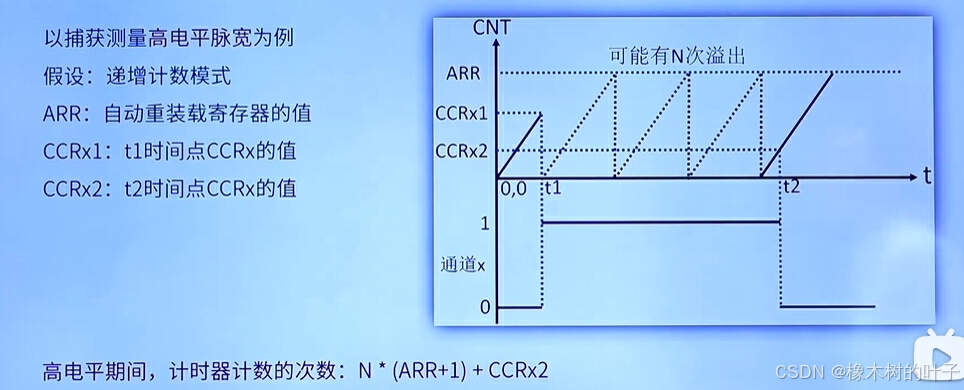
通用定时器输入捕获实战环节 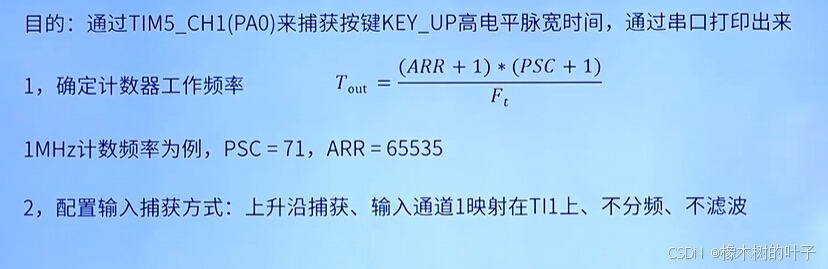
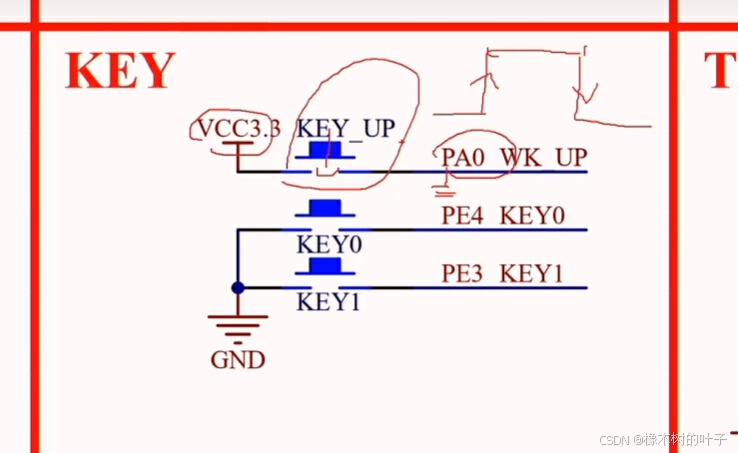
当key-up按下不松开的时候,PA0A就会输入一个上升沿的高电平,松开之后变成下降沿低电平,按下到松开的这段时间就是捕获的高电平时间。
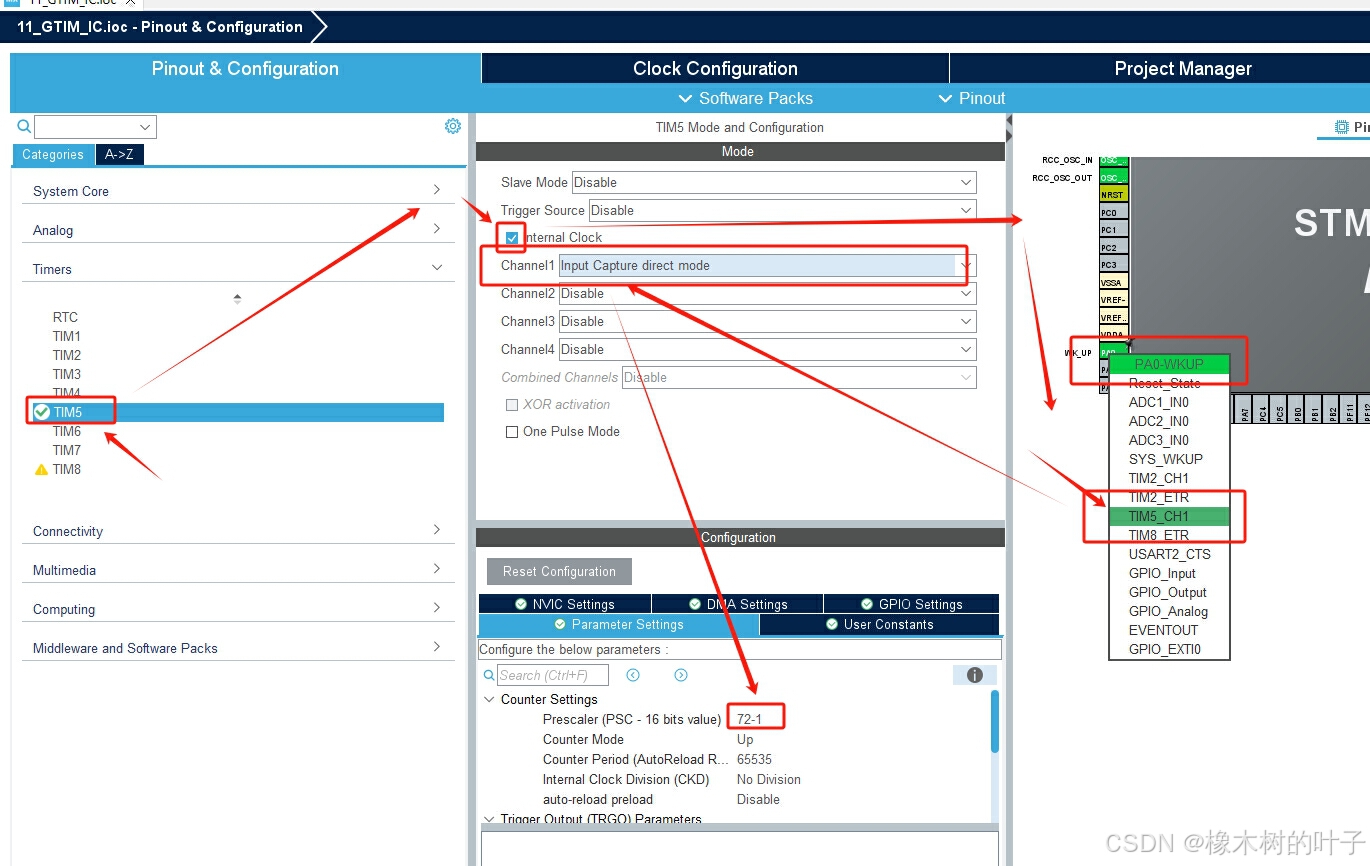
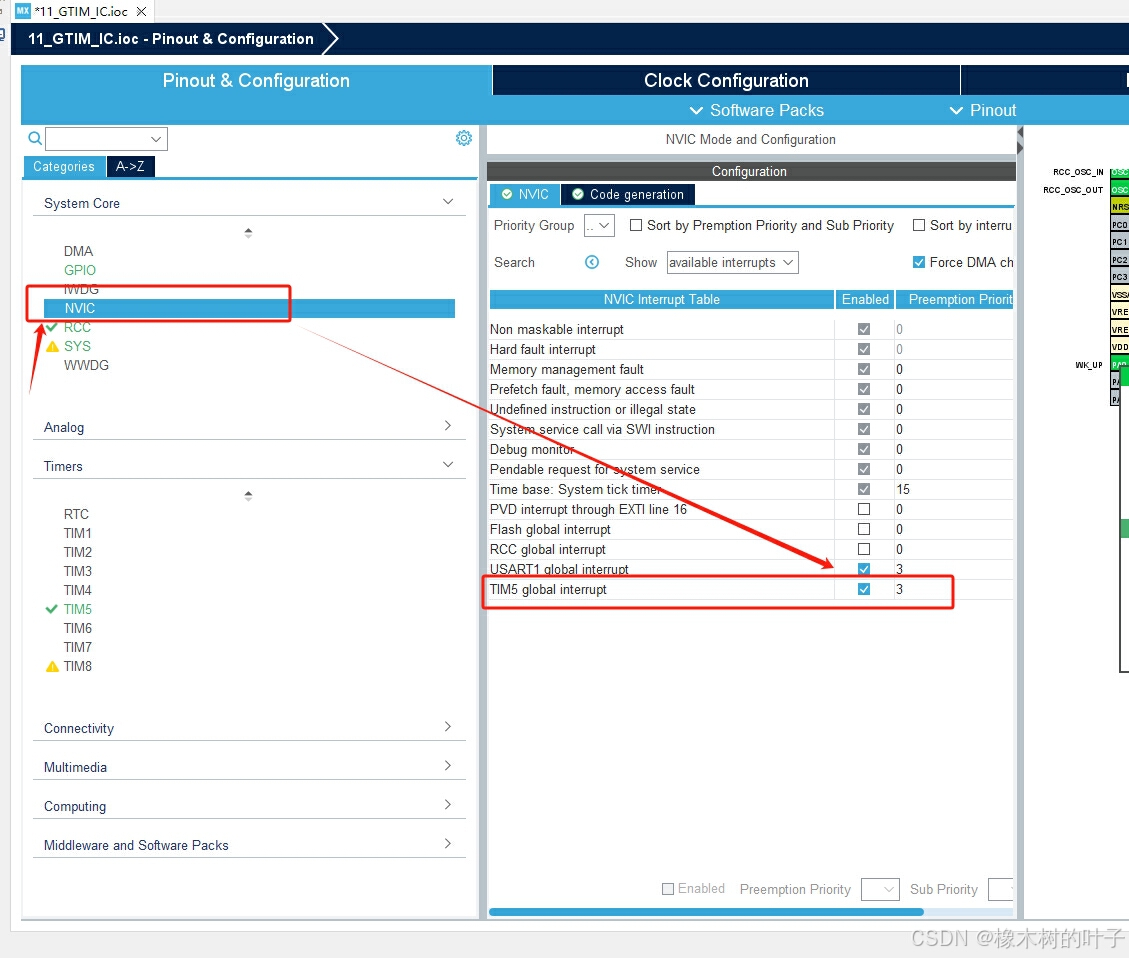
下面我们开始操作,复制黏贴串口中断那章的代码,打开图形化配置进行如下配置按照图中配置生成代码即可
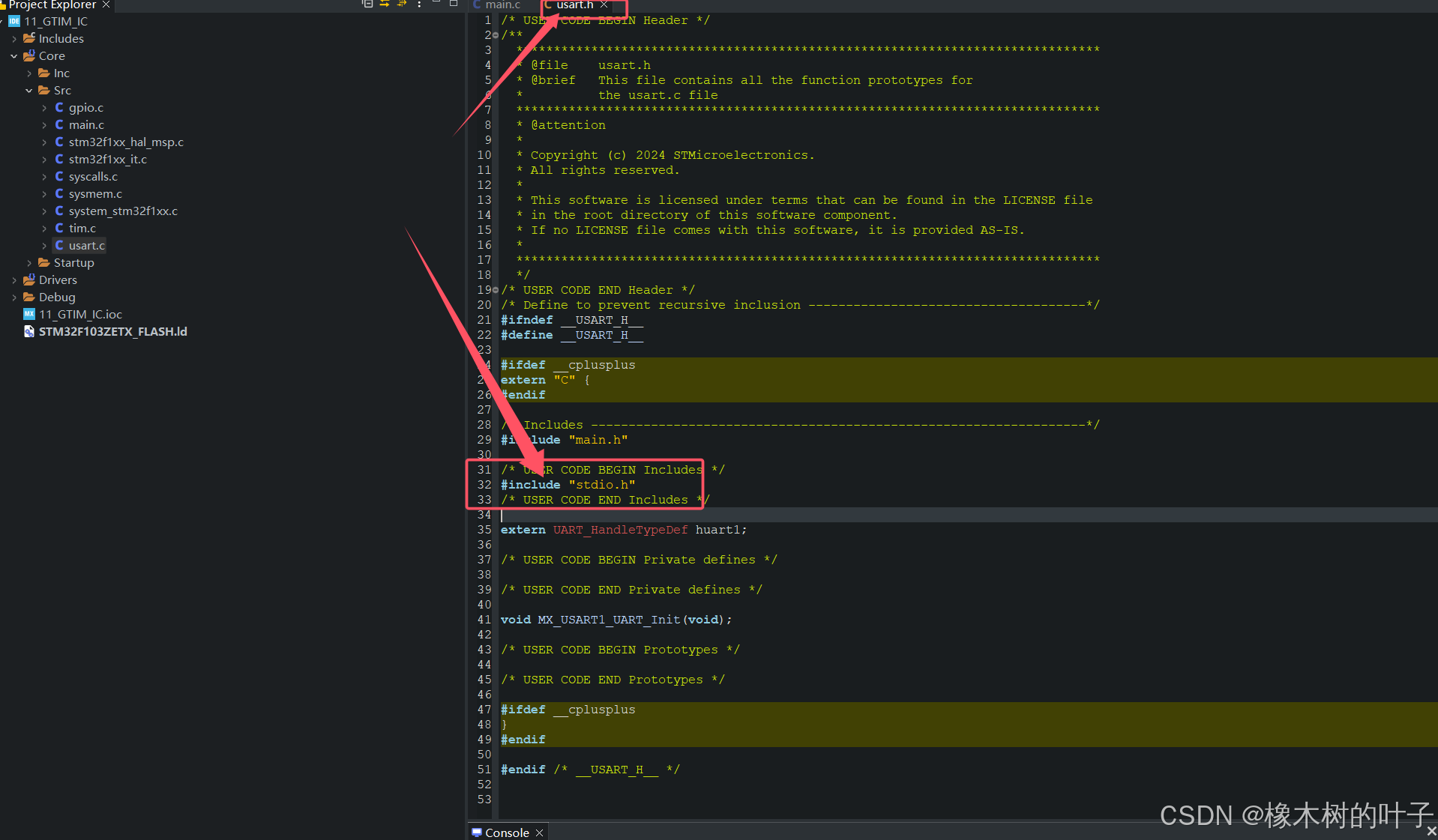
如果出现打印函数部分有警告在usart.h部分添加头函数声明即可
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "led.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
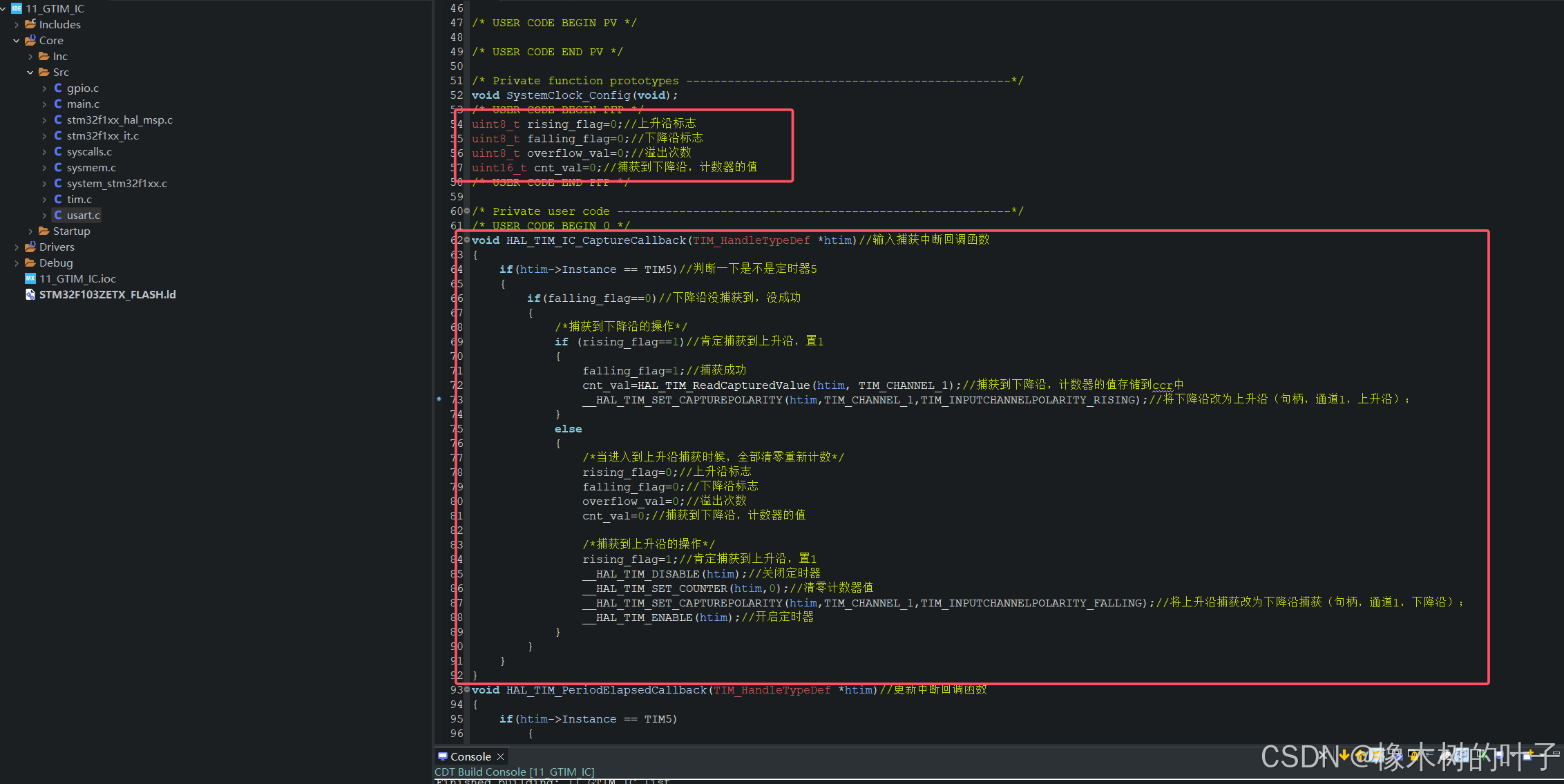
uint8_t rising_flag=0;//上升沿标志
uint8_t falling_flag=0;//下降沿标志
uint8_t overflow_val=0;//溢出次数
uint16_t cnt_val=0;//捕获到下降沿,计数器的值
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//输入捕获中断回调函数
{
if(htim->Instance == TIM5)//判断一下是不是定时器5
{
if(falling_flag==0)//下降沿没捕获到,没成功
{
/*捕获到下降沿的操作*/
if (rising_flag==1)//肯定捕获到上升沿,置1
{
falling_flag=1;//捕获成功
cnt_val=HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);//捕获到下降沿,计数器的值存储到ccr中
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING);//将下降沿改为上升沿(句柄,通道1,上升沿);
}
else
{
/*当进入到上升沿捕获时候,全部清零重新计数*/
rising_flag=0;//上升沿标志
falling_flag=0;//下降沿标志
overflow_val=0;//溢出次数
cnt_val=0;//捕获到下降沿,计数器的值
/*捕获到上升沿的操作*/
rising_flag=1;//肯定捕获到上升沿,置1
__HAL_TIM_DISABLE(htim);//关闭定时器
__HAL_TIM_SET_COUNTER(htim,0);//清零计数器值
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_FALLING);//将上升沿捕获改为下降沿捕获(句柄,通道1,下降沿);
__HAL_TIM_ENABLE(htim);//开启定时器
}
}
}
}
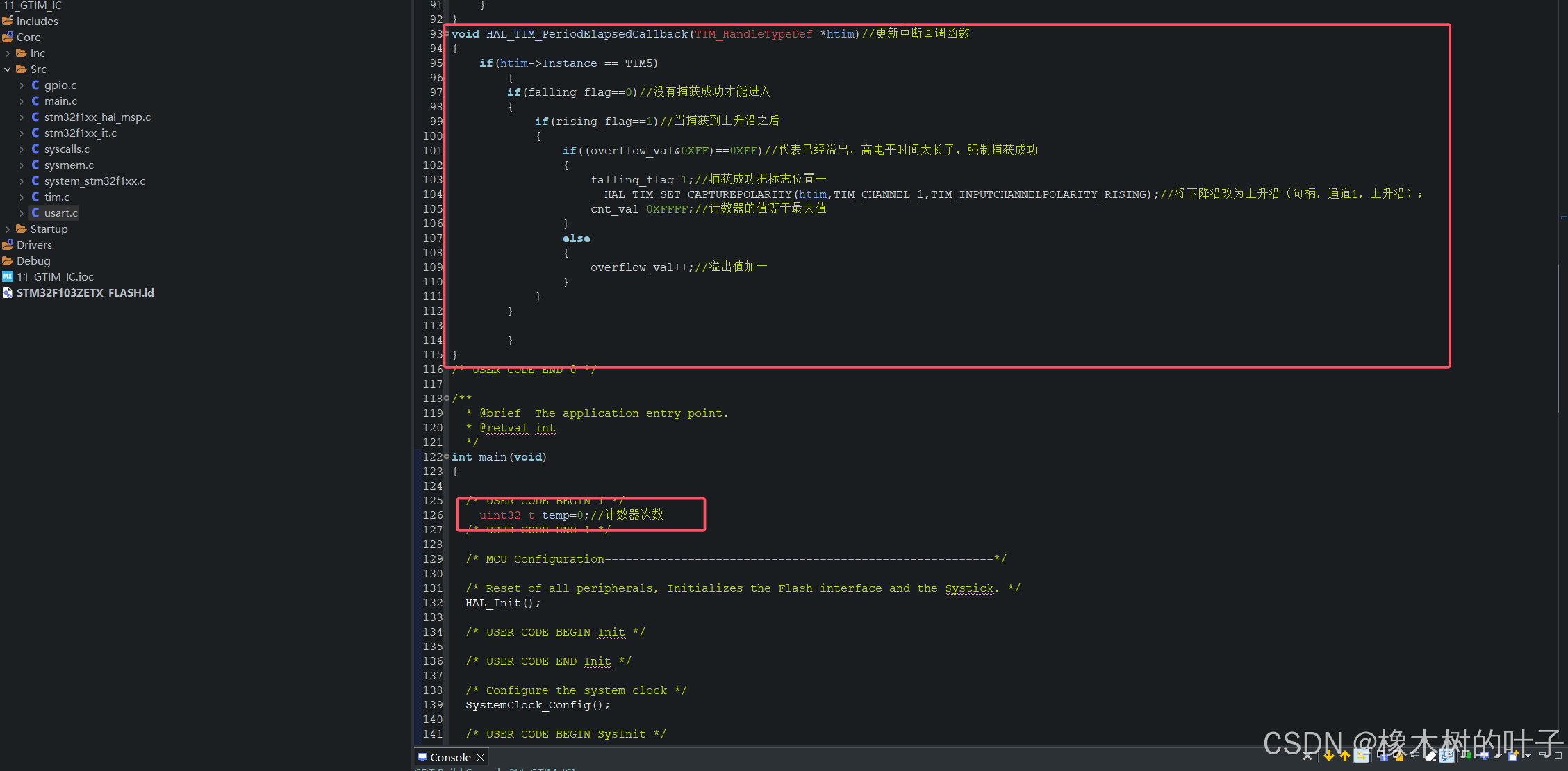
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//更新中断回调函数
{
if(htim->Instance == TIM5)
{
if(falling_flag==0)//没有捕获成功才能进入
{
if(rising_flag==1)//当捕获到上升沿之后
{
if((overflow_val&0XFF)==0XFF)//代表已经溢出,高电平时间太长了,强制捕获成功
{
falling_flag=1;//捕获成功把标志位置一
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING);//将下降沿改为上升沿(句柄,通道1,上升沿);
cnt_val=0XFFFF;//计数器的值等于最大值
}
else
{
overflow_val++;//溢出值加一
}
}
}
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint32_t temp=0;//计数器次数
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
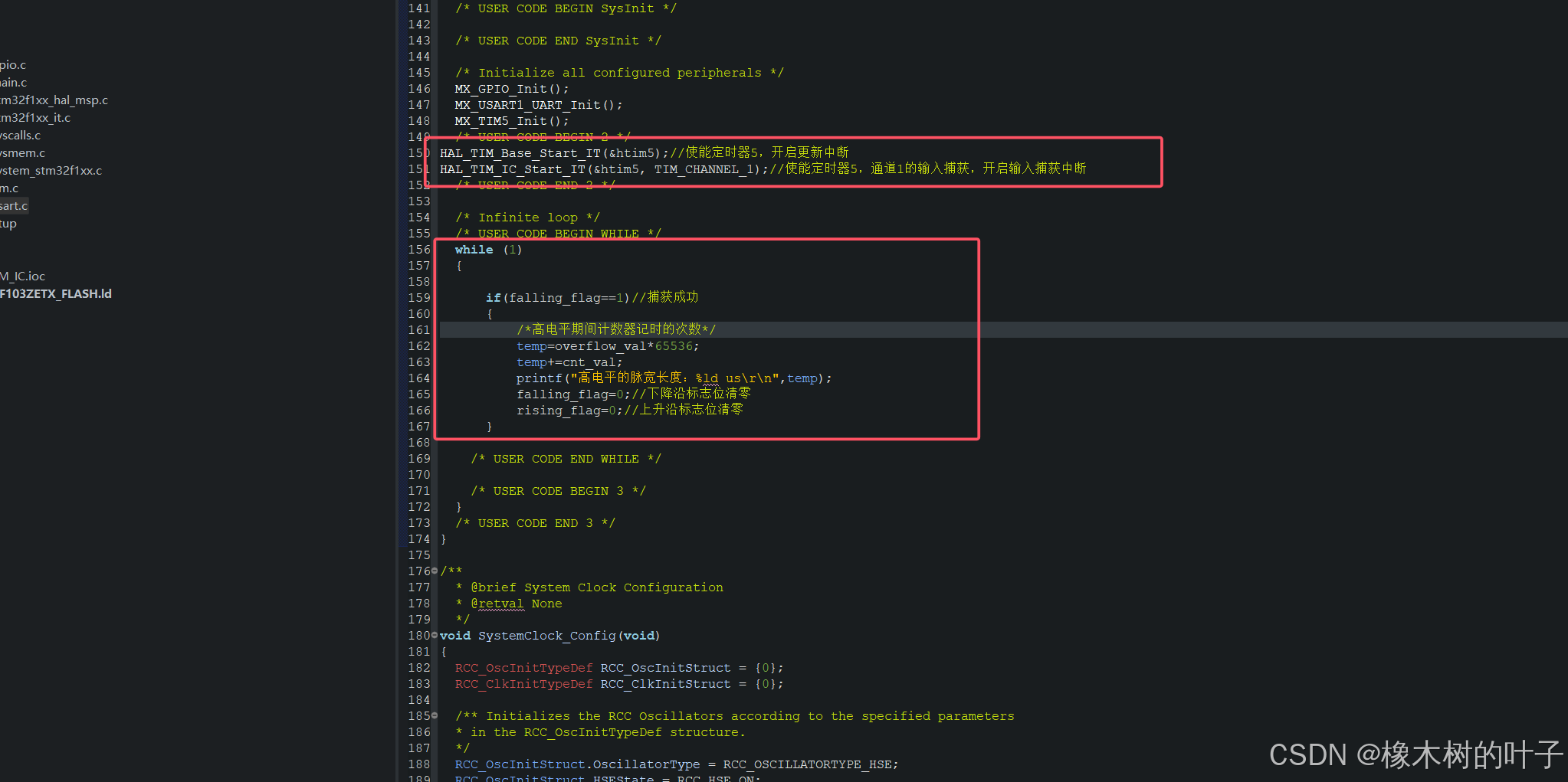
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM5_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim5);//使能定时器5,开启更新中断
HAL_TIM_IC_Start_IT(&htim5, TIM_CHANNEL_1);//使能定时器5,通道1的输入捕获,开启输入捕获中断
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(falling_flag==1)//捕获成功
{
/*高电平期间计数器记时的次数*/
temp=overflow_val*65536;
temp+=cnt_val;
printf("高电平的脉宽长度:%ld us\r\n",temp);
falling_flag=0;//下降沿标志位清零
rising_flag=0;//上升沿标志位清零
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
即可实现通过TIM5 CH1(PA0)来捕获按键KEY_UP高电平脉宽时间,通过串口打印出来。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









