




 本文介绍了一种名为LPN的网络,专为无人机导航中的跨视角地理定位设计。它借鉴了人类视觉系统处理不同视角信息的方式,通过共享卫星和无人机视角权重,结合ResNet特征提取和方环划分策略,有效利用上下文信息提高定位精度。
本文介绍了一种名为LPN的网络,专为无人机导航中的跨视角地理定位设计。它借鉴了人类视觉系统处理不同视角信息的方式,通过共享卫星和无人机视角权重,结合ResNet特征提取和方环划分策略,有效利用上下文信息提高定位精度。
Each Part Matters: Local Patterns Facilitate Cross-view Geo-localization
-
Each Part Matters: Local Patterns Facilitate Cross-view Geo-localization
-
时间
- 2021
-
作者
- 杭州电子科技大学自动化学院(人工智能学院)智能信息处理实验室博三学生王廷宇
-
idea
-
无人机导航,纳入了第三个图像,即:空域、地域、无人机视角
-
关注了图像邻近区域提供的信息
-
灵感来自于人类视觉系统解释和匹配不同观点的同一场景的过程。在识别两个不同平台的地理场景时,人类视觉系统通常采用分层处理的方式来提高判断的准确性。具体来说,人类视觉系统首先关注同一地理目标是否包含在不同的视点场景中。然后,人类视觉系统将检查地理目标周围的上下文信息,以验证匹配的正确性。当没有显著的地标时,人们通常会借助地图来寻找有区别的邻近地区。
-
-
method
-
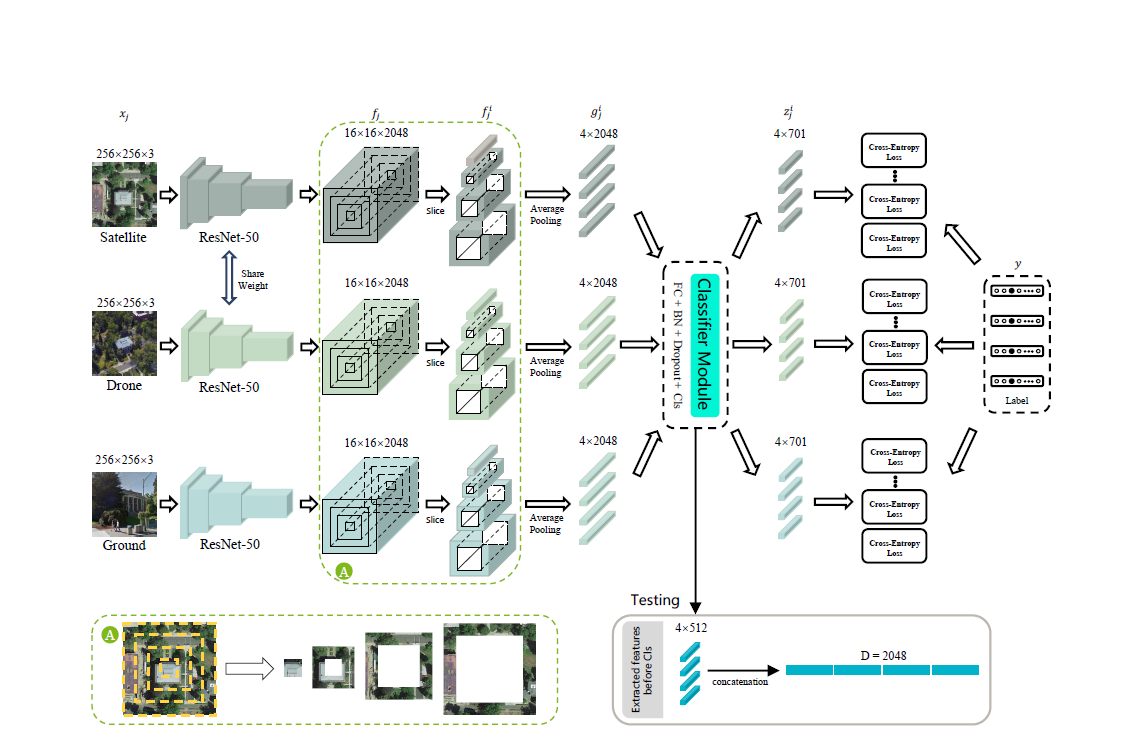
提出了一个Local Pattern Network (LPN)
-
具有三个分支,是孪生神经网络的扩展,分别包括卫星视角、无人机视角、地面视角
-
-
卫星视角和无人机视角共享权重
-
-
利用ResNet作为特征提取骨架
-
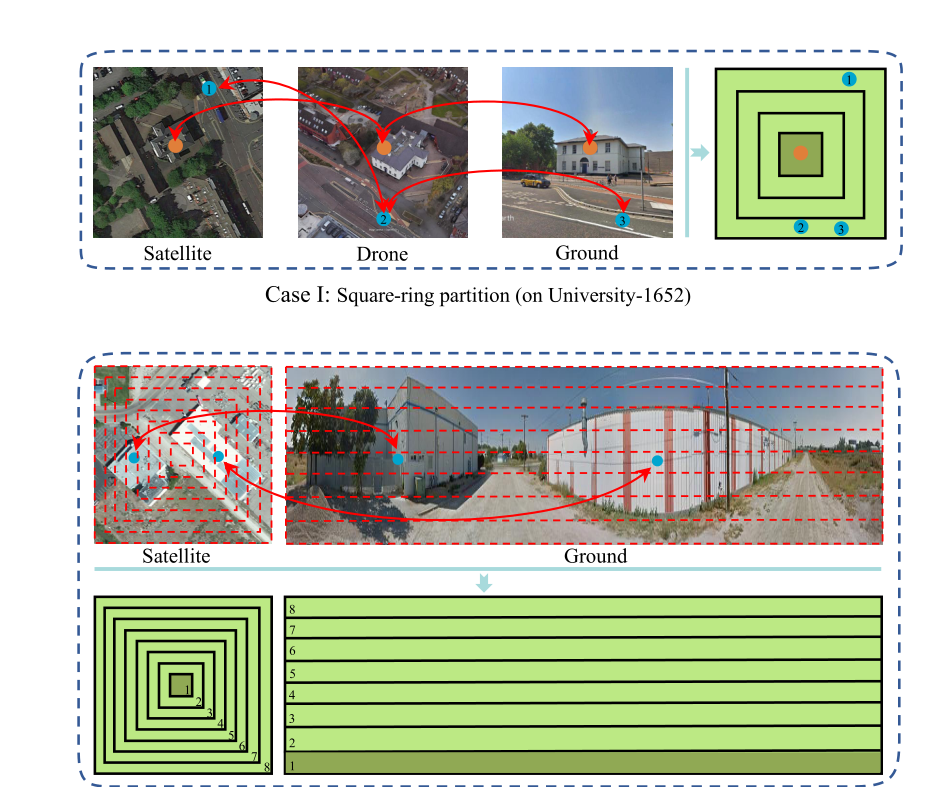
采用了“方环划分策略来划分特征”,地理目标一般分布在图像的中心,而上下文信息则呈辐射状分布在图像的四周。基于这种语义信息分布的假设,正方形环形分区的中心可以近似地位于特征映射的中心。
-
-


















 342
342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











