







1.error:selected FPU does not support instruction -- `vldmia r0,{s0-s15}'
虽然报错内容有差异,但解决方案还是可以使用的:
步骤2)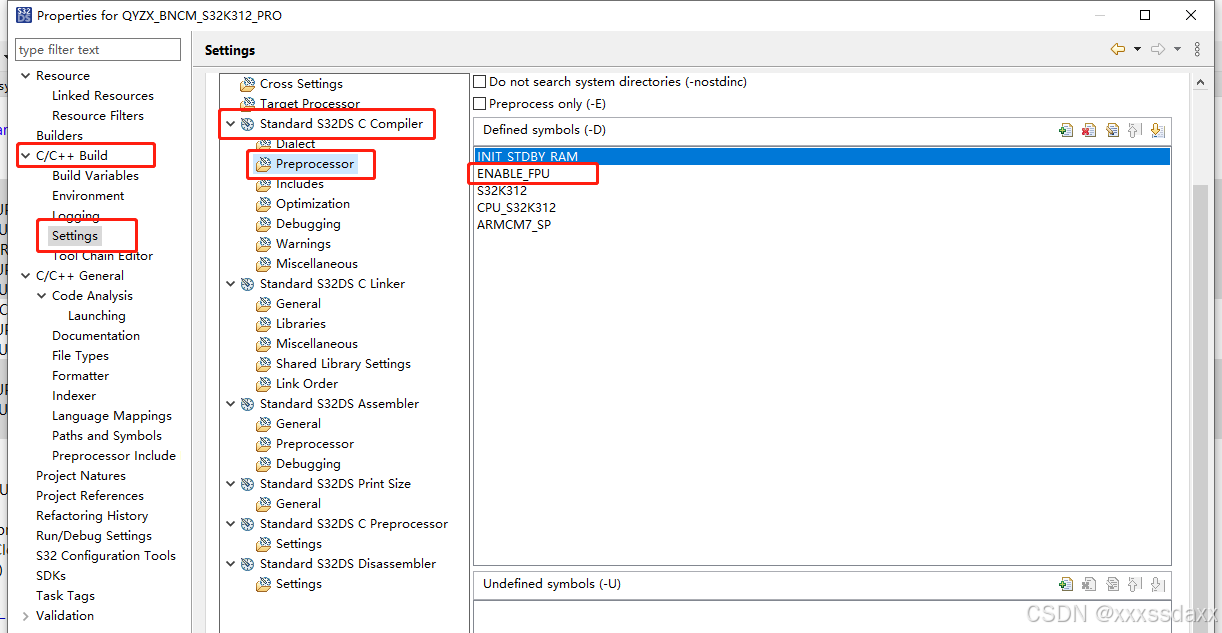
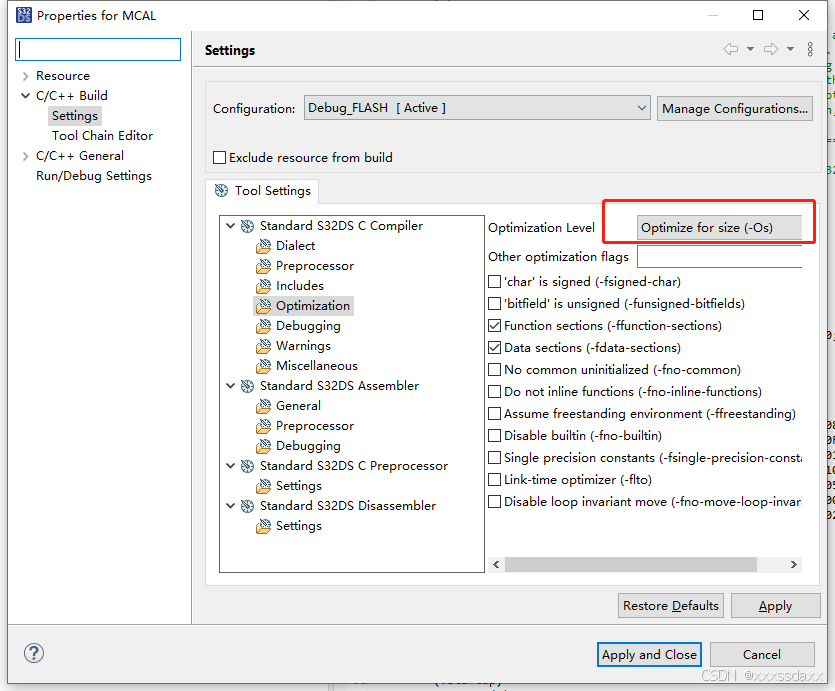
2.Ld error: region `int_sram' overflowed by 22200 bytes
Ld error: section .non_cacheable_data VMA [20408000,20408003] overlaps section .sram_bss VMA

步骤1:将MCAL文件下的代码 选择编译优化 (优化等级可根据实际项目来)
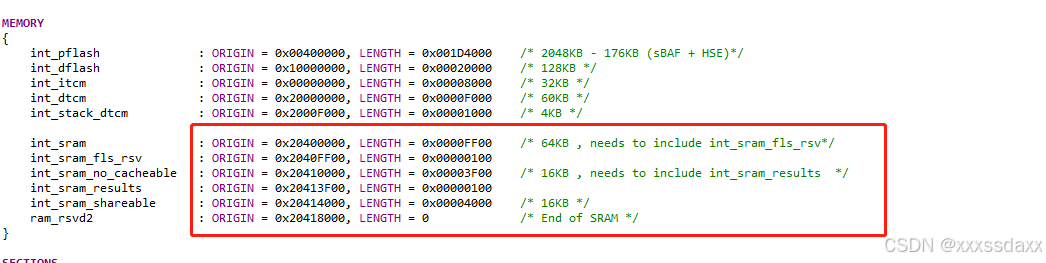
步骤2:修改Link文件内sram的大小
3.multiple definition of `_start'; d:/a_nxp_workspaces/s32ds_3_5_down/s32ds/build_tools/gcc_v10.2/gcc-10.2-arm32-eabi/bin/../lib/gcc/arm-none-eabi/10.2.0/../../../../arm-none-eabi/lib/thumb/v7e-m+fp/softfp/rdimon-crt0.o:/local/nxa09502/release/opt/freescale/Earmv7nGCC/obj_newlib_nano/arm-none-eabi/thumb/v7e-m+fp/softfp/libgloss/arm/../../../../../../../src_newlib/libgloss/arm/crt0.S:285: first defined here

(.text+0x0): multiple definition of `_start'这是怎么回事啊?【linux吧】_百度贴吧 (baidu.com)
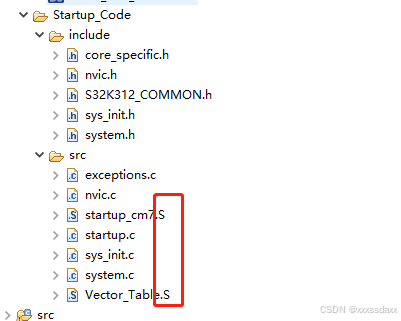
大概就是 启动文件里的Rest_Handler内代码于gcc编译标志库定义重复了
方案1:修改Reset_Handler():具体怎么改就不清楚了 ...
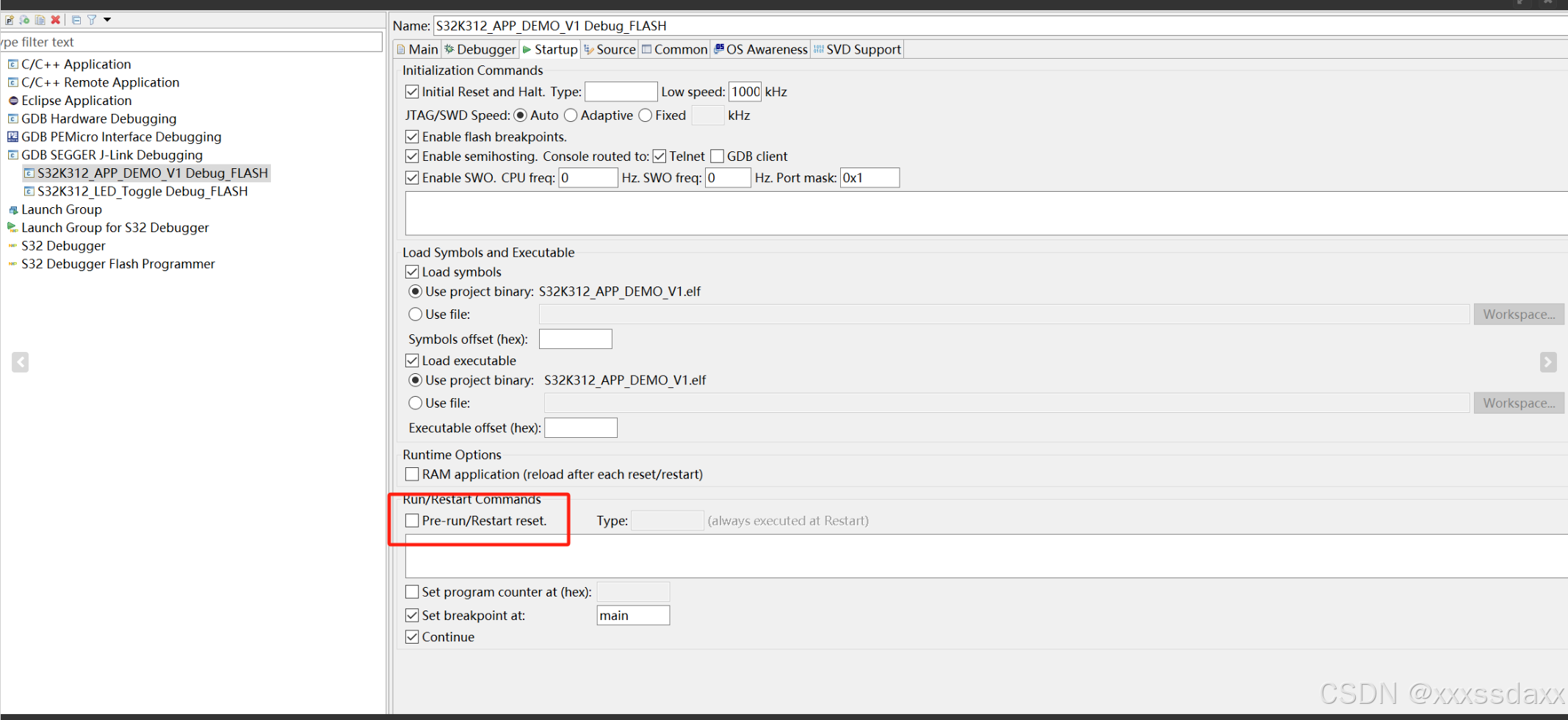
方案二:红框内 勾上即可
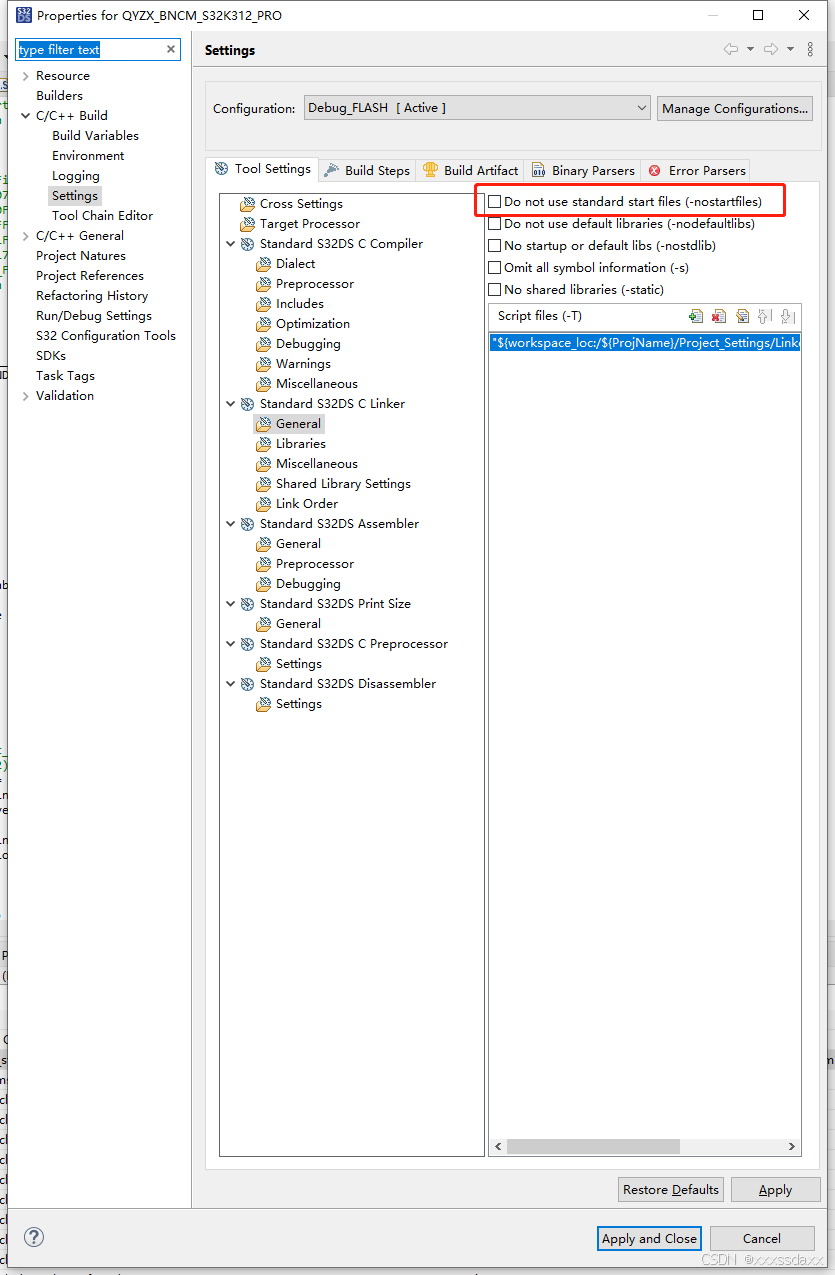
4.烧录后 无法进入reset_handler ,出现error No source available for "__interrupts_ram_start() at 0x2000035a""
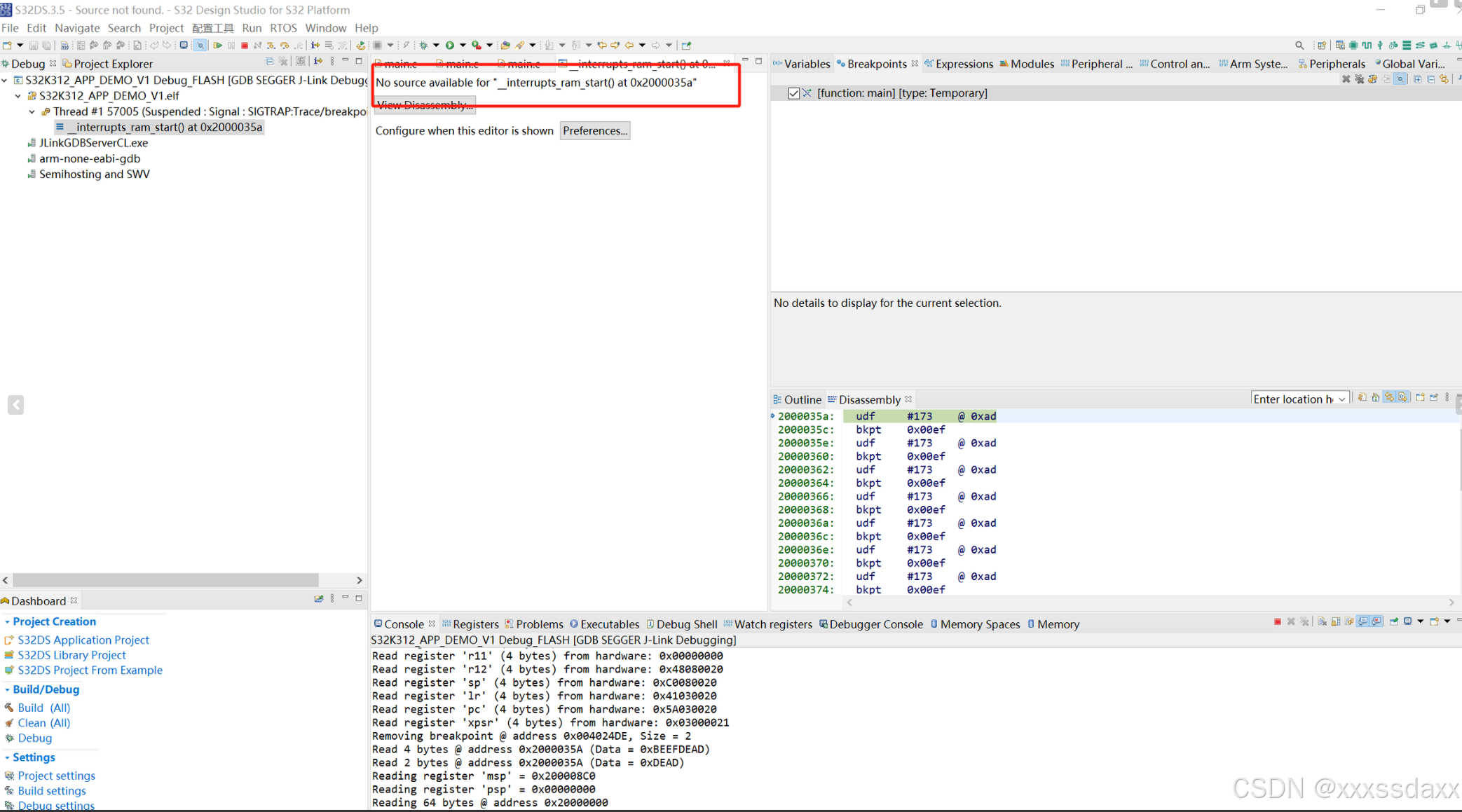
修改方案1. 跟gcc编译器有关系
方案2:取消此处勾选

















 587
587

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









