




1.一维卡尔曼滤波(恒定的动态模型)
2.一维卡尔曼滤波(动态模型)
3.二维-卡尔曼滤波算法
1. 使用场景
测量的是1维的数据,只有一个测量值(例如:电压,电流,温湿度采集)----采集的数据是随机的
和测量硬币直径不同-----硬币的直径是固定的
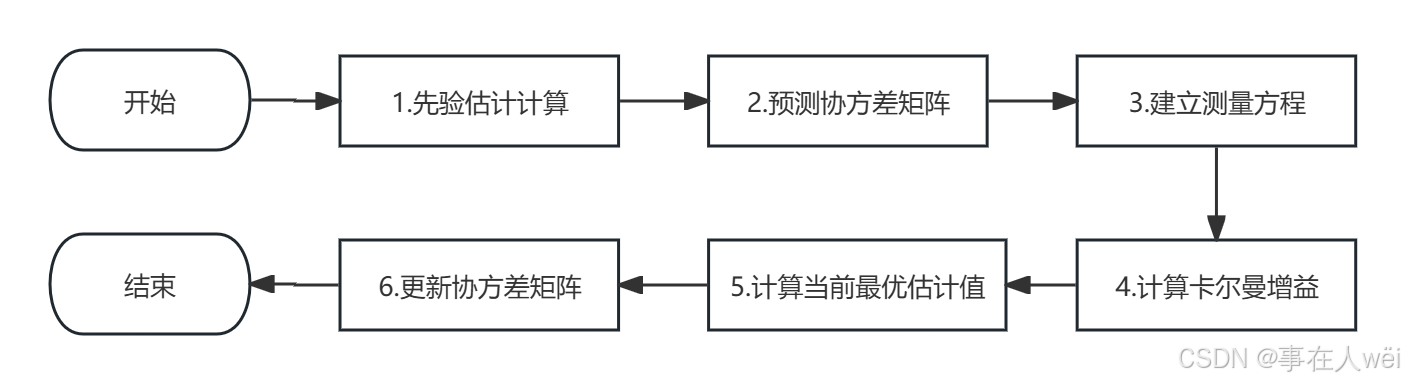
2. 流程图
下面是一维的卡尔曼滤波示例,由于一维的特殊性,有些变量是1或者没有,导致公式省略了好多,
建议你先去研究一下3.二维-卡尔曼滤波算法,弄明白了再回来看一维的,就简单明了了
1. 先验估计计算
📌 固定公式 :
X k = A ⋅ X k − 1 + B ⋅ U k + W k \displaystyle{{X}_{k}}=A⋅{{X}_{k-1}}+B⋅{{U}_{k}}+{{W}_{k}} Xk=A⋅Xk−1+B⋅Uk+Wk
•
X
k
:
是状态向量
\displaystyle {{X}_{k}} : \text{是状态向量}
Xk:是状态向量
•
A
=
[
1
]
:
是状态转移矩阵
\displaystyle {A}=\left [{\begin{matrix}1\end{matrix}}\right ]: \text{是状态转移矩阵}
A=[1]:是状态转移矩阵
•
B
=
[
0
]
:
是输入矩阵
(
没有
)
\displaystyle {B}=\left [{\begin{matrix}0\end{matrix}}\right ]:是输入矩阵(没有)
B=[0]:是输入矩阵(没有)
•
U
k
:
是控制输入向量
(
没有
)
\displaystyle {{U}_{k}}:是控制输入向量(没有)
Uk:是控制输入向量(没有)
•
W
k
:
是过程噪声向量
(
省略
)
\displaystyle {{W}_{k}}:是过程噪声向量(省略)
Wk:是过程噪声向量(省略)
📌 状态方程就可以写作:
X k = A ⋅ X k − 1 \displaystyle{{X}_{k}}=A⋅{{X}_{k-1}} Xk=A⋅Xk−1
X k = X k − 1 \displaystyle{{X}_{k}}={{X}_{k-1}} Xk=Xk−1 //代码1
2. 预测协方差矩阵
📌 固定公式 :
P k = A ⋅ P k − 1 ⋅ A T + Q = P k − 1 + Q \displaystyle{{P}_{k}}=A⋅{{P}_{k-1}}⋅{{A}^{T}}+Q={{P}_{k-1}}+Q Pk=A⋅Pk−1⋅AT+Q=Pk−1+Q
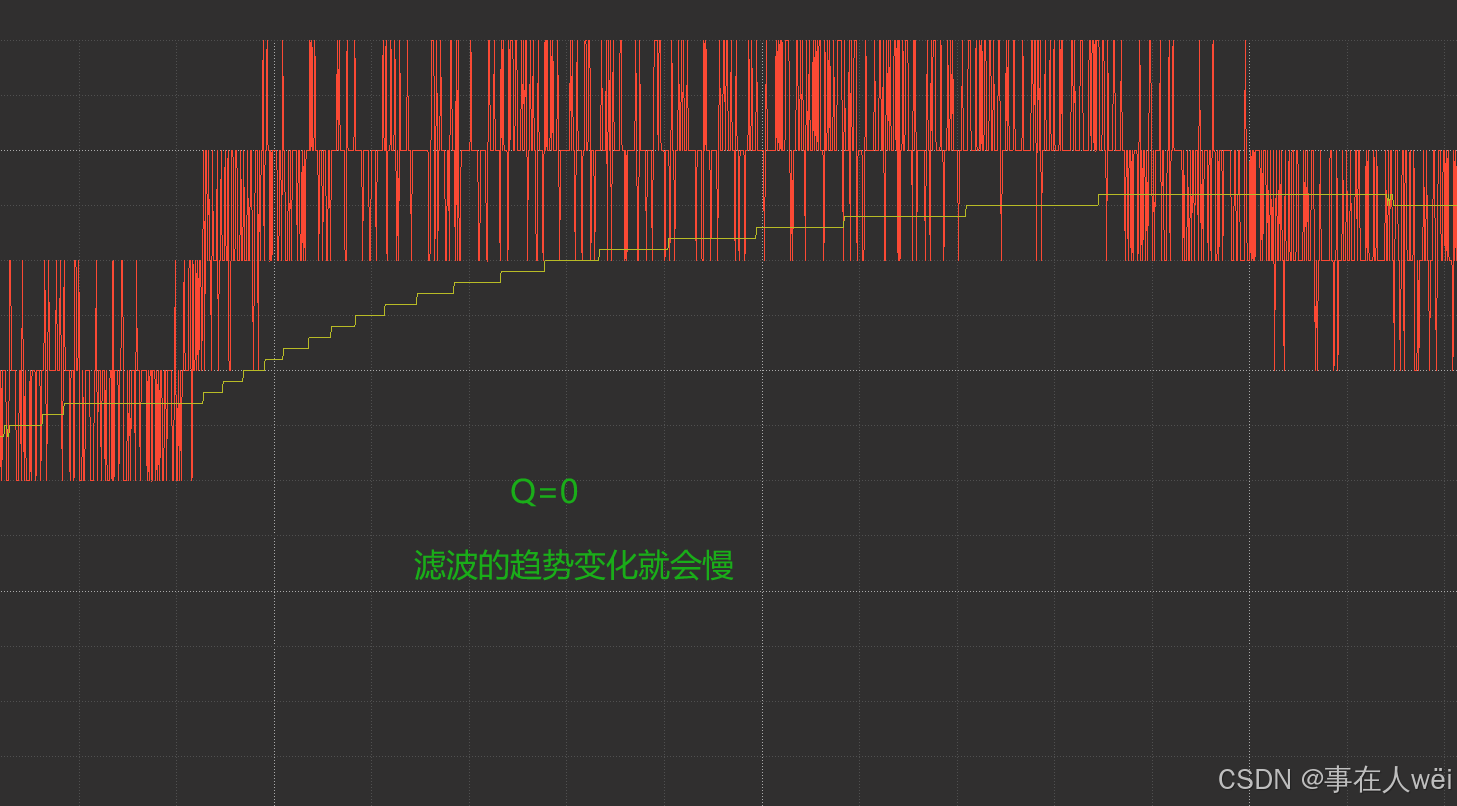
• Q : 过程噪声协方差矩阵 , 需要自定义好 \displaystyle {Q}:过程噪声协方差矩阵,需要自定义好 Q:过程噪声协方差矩阵,需要自定义好
static float Q = 0.01; // 代码01 过程噪声协方差矩阵
📌
P k = P k − 1 + Q \displaystyle{{P}_{k}}={{P}_{k-1}}+Q Pk=Pk−1+Q //代码2

3.建立测量方程
📌 固定公式 :
Z k = H X k + V k \displaystyle{{Z}_{k}}=H{{X}_{k}}+{{V}_{k}} Zk=HXk+Vk
📌
Z k = T e m p ( 传感器获取到的温度 ) / / 代码 3 \displaystyle{{Z}_{k}}=Temp (传感器获取到的温度) //代码3 Zk=Temp(传感器获取到的温度)//代码3
4.计算卡尔曼增益
📌 固定公式 :
K g ( k ) = P k − 1 ⋅ H T H P k − 1 ⋅ H T + R = P k − 1 P k − 1 + R \displaystyle{{K}_{g(k)}}=\frac{{{P}_{k-1}}⋅{{H}^{T}}}{H{{P}_{k-1}}⋅{{H}^{T}}+R} = \frac{{{P}_{k-1}}}{{{P}_{k-1}}+R} Kg(k)=HPk−1⋅HT+RPk−1⋅HT=Pk−1+RPk−1
• P k − 1 : 是先验状态协方差 ( P k 的初始值 = 1 ) \displaystyle {{P}_{k-1}}:是先验状态协方差({{P}_{k}}的初始值=1) Pk−1:是先验状态协方差(Pk的初始值=1)
• H : 是测量矩阵 [ 1 ] \displaystyle {H}:是测量矩阵\left [{\begin{matrix}1\end{matrix}}\right ] H:是测量矩阵[1]
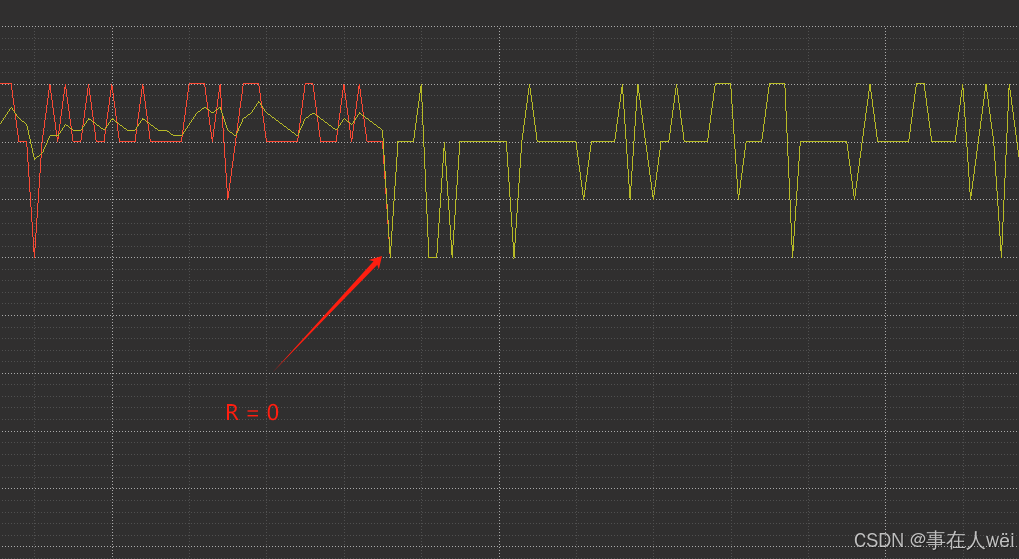
• R : 是测量噪声的协方差 , 需要自定义好 \displaystyle {R}:是测量噪声的协方差,需要自定义好 R:是测量噪声的协方差,需要自定义好
static float R = 0.05; // 代码02 测量噪声的协方差
📌
K g ( k ) = P k − 1 P k − 1 + R \displaystyle{{K}_{g(k)}}=\frac{{{P}_{k-1}}}{{{P}_{k-1}}+R} Kg(k)=Pk−1+RPk−1 //代码4
R=0时,卡尔曼滤波的曲线就会 和 测量值
Z
k
\displaystyle {{Z}_{k}}
Zk 重合
5.计算当前最优估计值
📌 固定公式 :
X k = X k − 1 + K g ( k ) ⋅ ( Z k − H ⋅ X k − 1 ) \displaystyle{{X}_{k}}={{X}_{k-1}}+{{K}_{g(k)}}⋅({{Z}_{k}}-H⋅{{X}_{k-1}}) Xk=Xk−1+Kg(k)⋅(Zk−H⋅Xk−1)
H = 1,所以
📌
X k = X k − 1 + K g ( k ) ⋅ ( Z k − X k − 1 ) \displaystyle{{X}_{k}}={{X}_{k-1}}+{{K}_{g(k)}}⋅({{Z}_{k}}-{{X}_{k-1}}) Xk=Xk−1+Kg(k)⋅(Zk−Xk−1) //代码5
6.更新协方差矩阵
📌 固定公式 :
P k = [ I − K g ( k ) ⋅ H ] ⋅ P k − 1 \displaystyle{{P}_{k}}=[I-{{K}_{g(k)}}⋅H]⋅{{P}_{k-1}} Pk=[I−Kg(k)⋅H]⋅Pk−1
I \displaystyle I I:单位矩阵 [ 1 ] \displaystyle\left [{\begin{matrix}1\end{matrix}}\right ] [1]
📌
P k = [ 1 − K g ( k ) ] ⋅ P k − 1 \displaystyle{{P}_{k}}=[1-{{K}_{g(k)}}]⋅{{P}_{k-1}} Pk=[1−Kg(k)]⋅Pk−1 //代码6
7.实现代码
/**
* @brief 卡尔曼滤波
*
* @param Zk 测量值
* @return float 输出值
*/
float Kalman_filtering(float Zk)
{
static float Q = 0.001; // 代码01 过程噪声协方差矩阵
static float R = 0.05; // 代码02 测量噪声的协方差
static float Pk = 1; //
static float Kg = 1; //
static float Xk = 0; //
// 1.先验估计计算
// Xk = X(k-1); // 代码1
// 2.预测协方差矩阵
Pk = Pk + Q; // 代码2
// 3.建立测量方程
// Zk = Zk; // 代码3
// 4.计算卡尔曼增益
Kg = Pk / (Pk + R); // 代码4
// 5.计算当前最优估计值
Xk = Xk + Kg * (Zk - Xk); // 代码5
// 6.更新协方差矩阵
Pk = (1 - Kg) * Pk; // 代码6
return Xk;
}
卡尔曼滤波需要我们来调教,分别调节下面的参数,会获取到不同的滤波效果
static float Q = 0.001; // 代码01 过程噪声协方差矩阵
static float R = 0.05; // 代码02 测量噪声的协方差
注意:例如一个温度采集,这个温度是随机变化的,和时间变化没有关系,所以上面的计算中并没有使用到dt变量(采样时间间隔=100ms,500ms,1000ms…),但是这个时间间隔对参数迭代会有影响,因此dt同样会影响到滤波效果

















 743
743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









