







Matlab Simulink提供的控制参数整定效果还是值得肯定的,在此记录本人进行PID参数整定的过程,有不对之处忽略即可,但更欢迎批评指正。
资料引用(基于Matlab官方)
Cascade Digital PID Control Design for Power Electronic Converters
Multiloop Control Design for Buck Converter
引用资料的两个例子分别介绍了逐级调参和同时调参两个方法,下面对其分别进行说明
考虑到篇幅,将分为三个部分介绍.
【1】逐级调参-内环
【2】逐级调参-外环
【3】同时调参
二、同时调参(Multiloop Control Design for Buck Converter)
相同步骤不再赘述,参照前两篇的内容。下面是simulink建模的原理图,与前面例程相同。
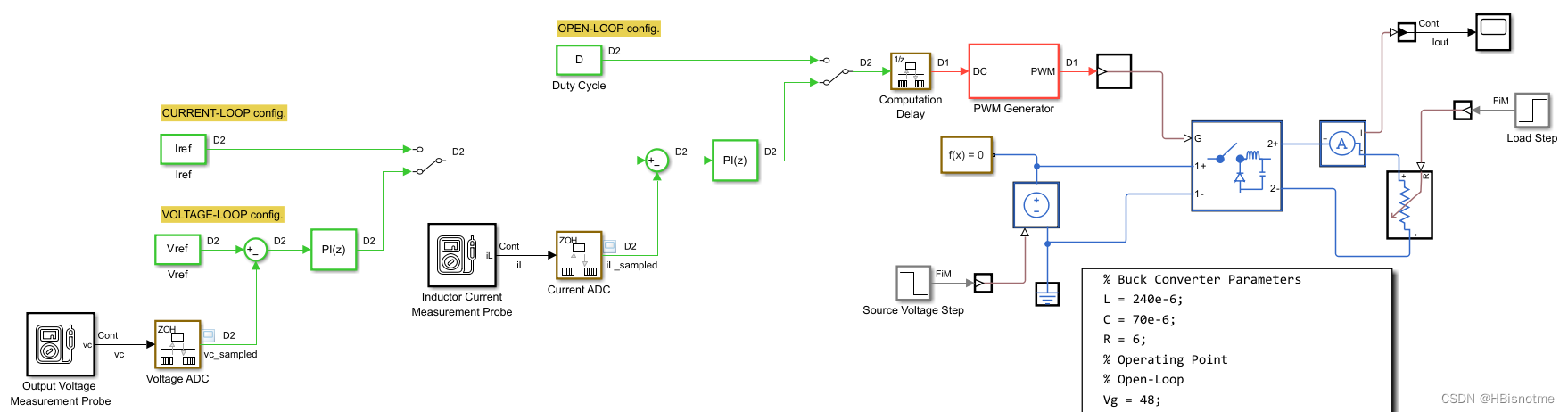
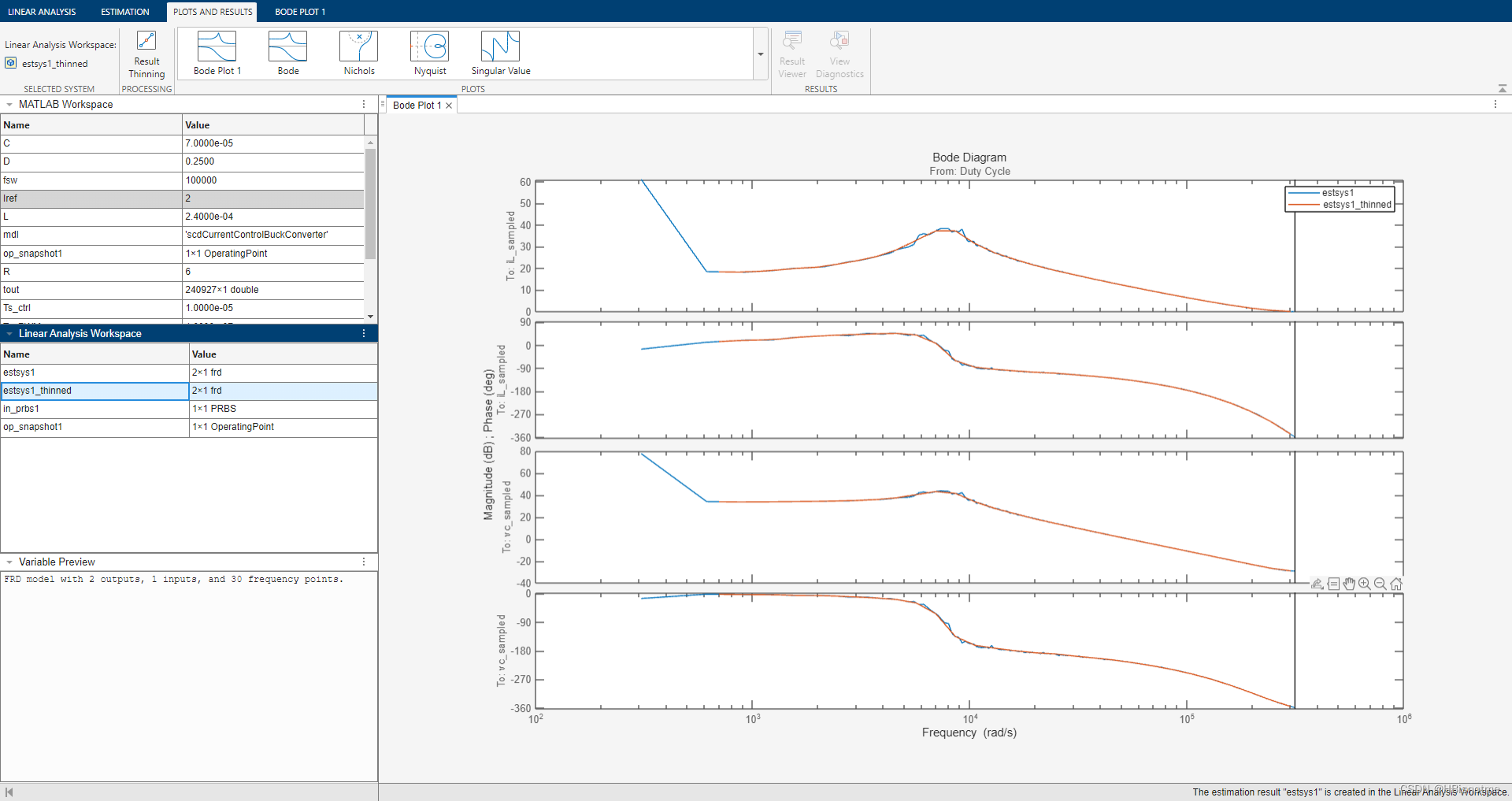
1 非参简化模型获取
确定稳态工作点👉注入扰动信号👉分别在电流采样和电压采样两个点测量输出,求频率响应👉对其进行简化,得到非参简化模型如下图。
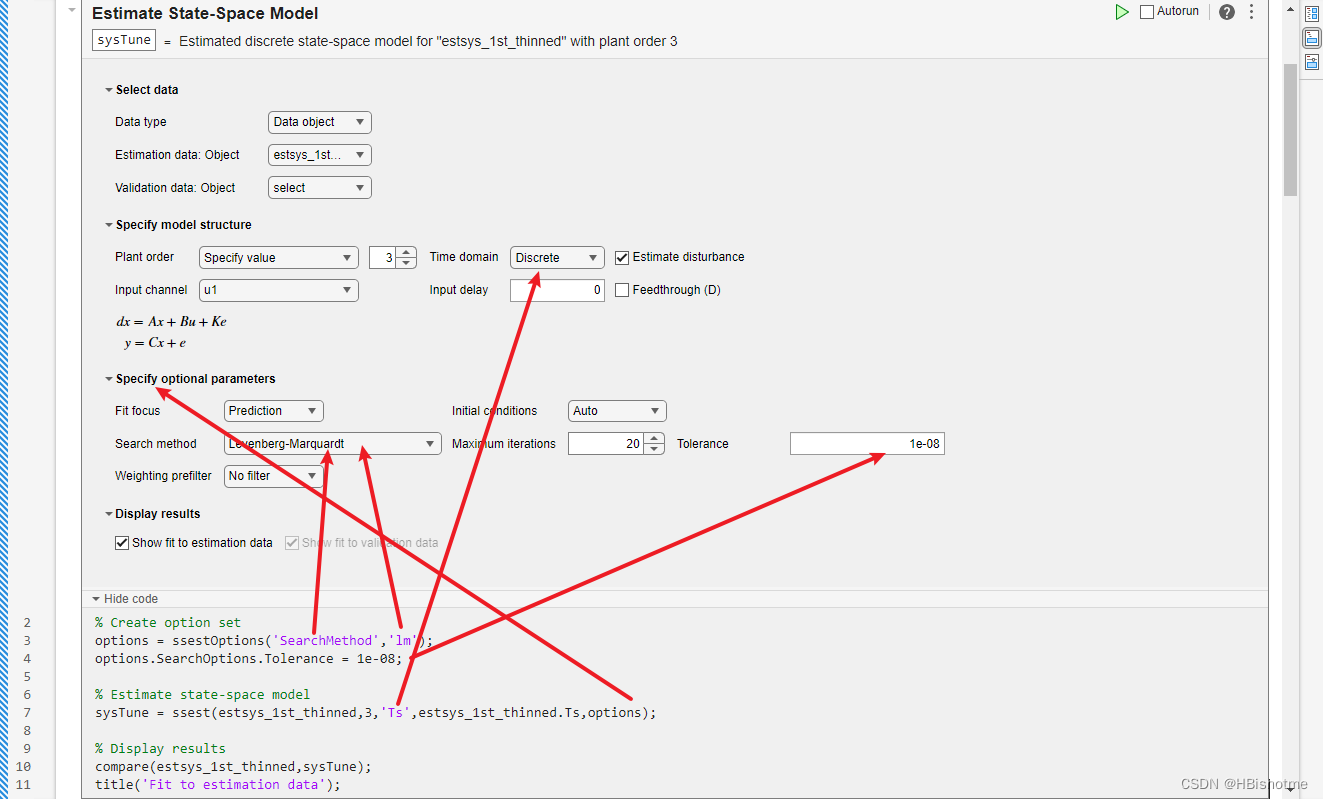
2. 获得参数化模型
该部分是通过非参模型(仿真数据)来构建参数模型
此部分重点介绍基于参数化模型进行PID调节的方法,我目前还没有找到工具箱,但有一个“Estimate State-Space Model with Live Editor Task”可以用,下面是界面
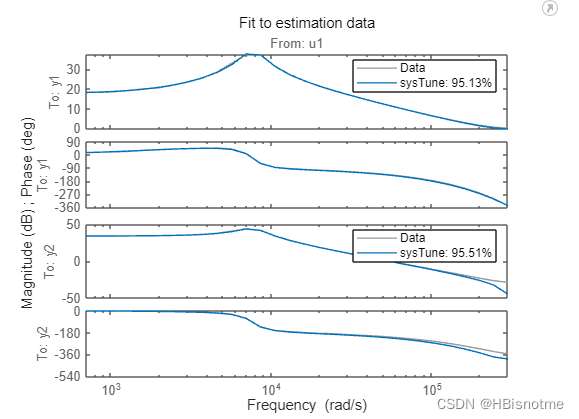
运行后的结果如下图
蓝色是参数化模型,在电压环的高频段有一些偏差,但总体影响不大,毕竟电压环最终整定的带宽也比较窄。总体吻合度是95.5%
3.首先构建内环和外环的turablePID对象,原例程中是PI形式
Ci = tunablePID('Ci','PI',Ts_ctrl);
Ci.IFormula =  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 818
818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











