






主要思想
设置一个集合S存放已经找到最短路径的顶点,S的初始状态只包含源点v,
对vi∈V - S,假设从源点v到vi的有向边为最短路径(从v到其余顶点的最短路径的初值)。
以后每求得一条最短路径v, …, vk,就将vk加入集合S中,并将路径v, …, vk, vi与原来的假设相比较,取路径长度较小者为最短路径。
重复上述过程,直到集合V中全部顶点加入到集合S中
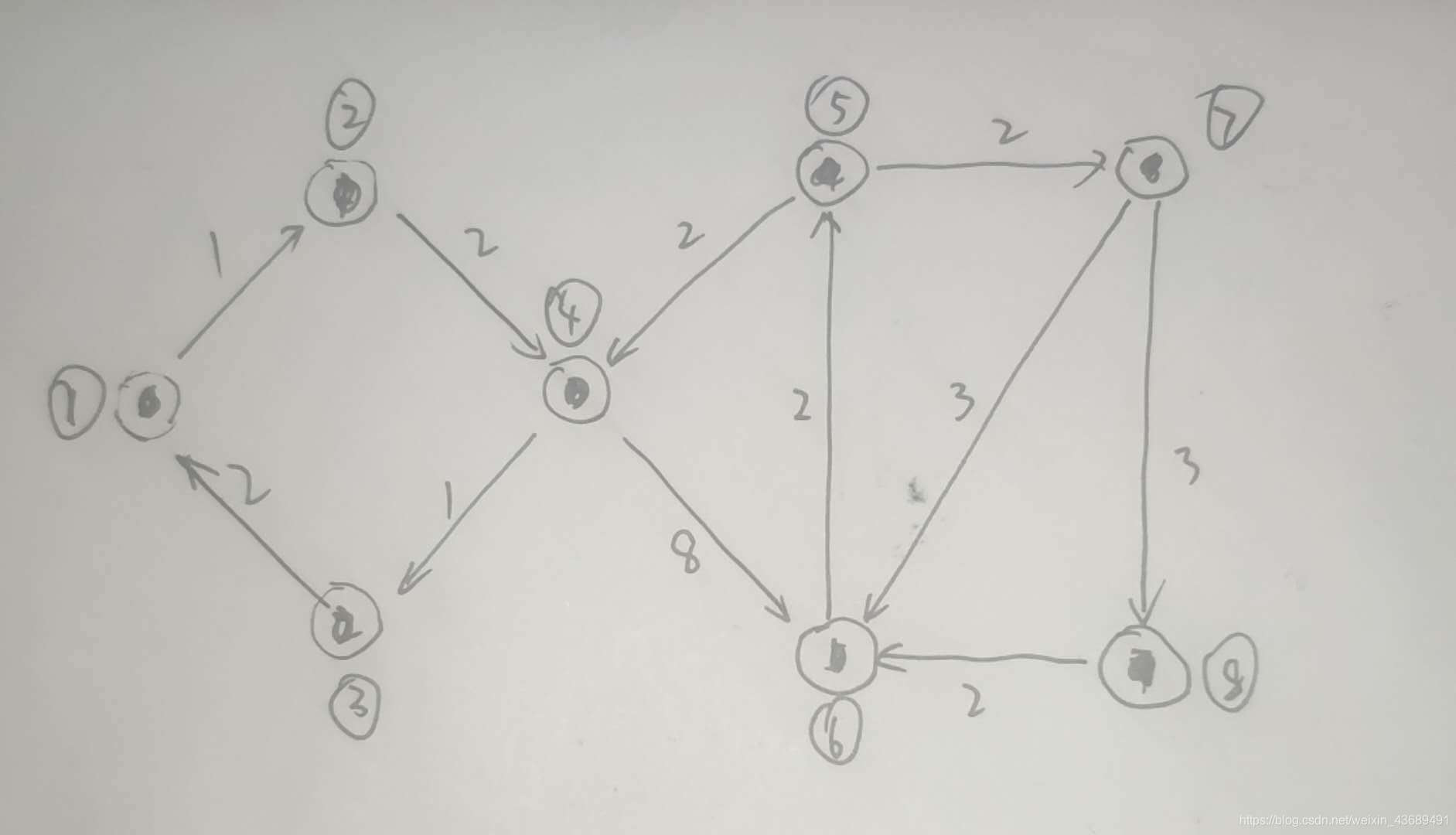
列题
#include <bits/stdc++.h>
#define Inf 1000000
using namespace std;
int MAP[1005][1005];
int vis[1005], dis[1005];
int n, m;//n个点,m条边
void Init() //原地到原地边权为0
{
memset(MAP, Inf, sizeof(MAP));
for (int i = 1; i <= n; i++)
{
MAP[i][i] = 0;
}
}
void Getmap() //输入数据
{
int u, v, w;
for (int t = 1; t <= m; t++)
{
cin >> u >> v >> w;
if (MAP[u][v] > w)
{
MAP[u][v] = w;
}
}
}
void Dijkstra(int u){//起点为u
memset(vis, 0, sizeof(vis)); //全部为0,都没有确定
for (int t = 1; t <= n; t++)
{
dis[t] = MAP[u][t];
}
vis[u] = 1;
for(int t=1;t<=n;t++){
if(!vis[i]&&dis[i]<minn){
minn=dis[i];
temp=i;
}
}
vis[temp]=1;
for(int i=1;i<=n;i++){
if(MAP[temp][i]+dis[temp]<dis[i])
dis[i]=MAP[temp][i]+dis[temp];
}
}
int main(){
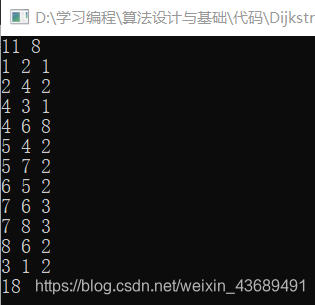
cin>>m>>n;
Init();
Getmap();
Dijkstra(1);//起点为1端点
cout<<dis[8];//1到8的最短距离结果

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









