






核方法
∙
\bullet
∙ 前面我们用超平面(线性模型)来分开不同类型的训练箱体
∙
\bullet
∙ 但在实际任务中,原始样本空间也许不存在一个超平面能将训练样本分开,例如:
∙
\bullet
∙ 对这类问题,我们可以将原始空间映射到一个更高维的空间,使得在这个特征空间数据线性可分
∙
\bullet
∙ 令
ϕ
(
x
)
\phi(\mathbf x)
ϕ(x)表示将
x
\mathbf x
x映射后的特征向量,则在特征空间划分超平面对应的模型可表示为:
f
(
x
)
=
w
T
ϕ
(
x
)
+
b
f(\mathbf x) = \mathbf w^T\phi(\mathbf x) + b
f(x)=wTϕ(x)+b
∙
\bullet
∙ 根据之前SVM的推导,得到特征映射后的SVM目标函数为:
m
i
n
w
,
b
=
1
2
∣
∣
w
∣
∣
2
2
+
C
∑
i
=
1
N
ξ
i
min_{w,b} = \frac{1}{2}||\mathbf w||_{2}^2 + C\sum_{i=1}^{N}\xi_{i}
minw,b=21∣∣w∣∣22+Ci=1∑Nξi
s
.
t
.
y
i
(
w
T
ϕ
(
x
)
+
b
)
>
=
1
−
ξ
i
,
i
=
1
,
.
.
.
,
N
s.t. \space\space y_{i}(\mathbf w^T \phi(\mathbf x) + b) >= 1 - \xi_i,i=1,...,N
s.t. yi(wTϕ(x)+b)>=1−ξi,i=1,...,N
ξ
i
>
0
,
i
=
1
,
.
.
.
,
N
\xi_{i} > 0, i = 1,...,N
ξi>0,i=1,...,N
核方法—对偶
∙
\bullet
∙ 相应的对偶问题为:
m
a
x
α
∑
i
=
1
N
α
i
−
1
2
∑
i
=
1
N
∑
j
=
1
N
α
i
α
j
y
i
y
j
<
ϕ
(
x
i
)
,
ϕ
(
x
i
)
>
max_{\alpha}\sum_{i=1}^{N}\alpha_{i} - \frac{1}{2}\sum_{i=1}^{N}\sum_{j=1}^{N}\alpha_{i}\alpha_{j}y_{i}y_{j}<\phi(\mathbf x_{i}),\phi(\mathbf x_{i})>
maxαi=1∑Nαi−21i=1∑Nj=1∑Nαiαjyiyj<ϕ(xi),ϕ(xi)>
s
.
t
.
0
<
=
α
i
<
=
C
,
i
=
1
,
.
.
.
,
N
s.t. \space\space 0 <= \alpha_{i} <= C, i = 1,...,N
s.t. 0<=αi<=C,i=1,...,N
∑
i
=
1
N
α
i
y
i
=
0
\sum_{i=1}^{N}\alpha_{i}y_{i} = 0
i=1∑Nαiyi=0
∙
\bullet
∙ 求得对偶问题的解
α
\alpha
α后,可计算
w
,
b
\mathbf w,b
w,b,从而得到分类判别函数:
f
(
x
)
=
W
T
ϕ
(
x
)
+
b
f(\mathbf x) = \mathbf W^T\phi(\mathbf x) + b
f(x)=WTϕ(x)+b
=
∑
i
=
1
N
α
i
y
i
<
ϕ
(
x
i
)
,
ϕ
(
x
)
>
+
b
=\sum_{i=1}^{N}\alpha_{i}y_{i}<\phi(\mathbf x_{i}), \phi(\mathbf x)> + b
=i=1∑Nαiyi<ϕ(xi),ϕ(x)>+b
核技巧
∙
\bullet
∙ 将问题变为对偶问题:只需计算点积
1)在SVM中,最大化下列目标函数

2)判别函数为:
∙
\bullet
∙ 由于特征空间维数可能很高(甚至无穷维),直接计算特征空间的点积通常是困难的
∙
\bullet
∙ 核函数:高维空间中的点积可写成核(kernel)的形式
K
(
x
i
,
x
j
)
=
<
ϕ
(
x
i
)
,
ϕ
(
x
j
)
>
K(\mathbf x_{i}, \mathbf x_{j}) = <\phi(\mathbf x_i), \phi(\mathbf x_j)>
K(xi,xj)=<ϕ(xi),ϕ(xj)>老师说到点积的时候,说也就是相似度,那么应如何理解呢?
∙
\bullet
∙ 选定核函数,无需计算映射
ϕ
(
x
)
\phi(\mathbf x)
ϕ(x)就可以计算点积
1)SVM核化目标函数为 2)预测模型为
2)预测模型为 没有+b这一项吗
没有+b这一项吗
构造核函数
∙
\bullet
∙ 一种核函数的构造方式是显示地定义一个特征映射
ϕ
(
.
)
\phi(.)
ϕ(.),将每个输入x映射到
ϕ
(
x
)
\phi(\mathbf x)
ϕ(x),从而得到核函数的间接定义
k
(
x
,
x
′
)
=
ϕ
(
x
)
T
ϕ
(
x
′
)
k(\mathbf x, \mathbf x') = \phi(\mathbf x)^T\phi(\mathbf x')
k(x,x′)=ϕ(x)Tϕ(x′)其中的
ϕ
(
x
)
\phi(\mathbf x)
ϕ(x)称为基函数。相对于直接求点积,这种方式好像也不能节省开销吧,因为最终还是要求点积。
∙
\bullet
∙ 显示定义特征映射的情况下,核函数为特征空间(可能为无限维)中的内积。
∙
\bullet
∙ 另一种可选方式是直接定义核函数,此时需保证核函数是有效核。令x为输入空间,k(.,.)是定义在x*x上的对称函数,则k是核函数的充要条件是对已任意数据
D
=
{
x
1
,
.
.
.
,
x
N
}
D = \{x_{1},...,x_{N}\}
D={x1,...,xN},则核矩阵K总是半正定的。正定、半正定的准确定义?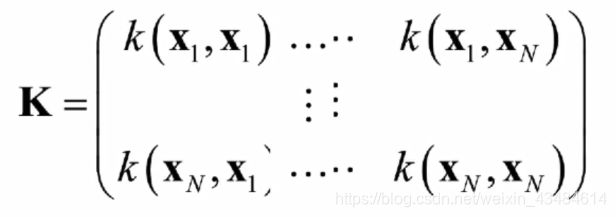 对于一个半正定核矩阵,总是能找到一个与之对应的
ϕ
\phi
ϕ。任何一个核函数都隐式定义了一个再生Hibert空间。
对于一个半正定核矩阵,总是能找到一个与之对应的
ϕ
\phi
ϕ。任何一个核函数都隐式定义了一个再生Hibert空间。
可以通过找到
ϕ
\phi
ϕ ,找到K,也可以直接找到K,这样必然会有一个
ϕ
\phi
ϕ存在,但再回去找已经没意义了,因为最终需要的就是K。
多项式核
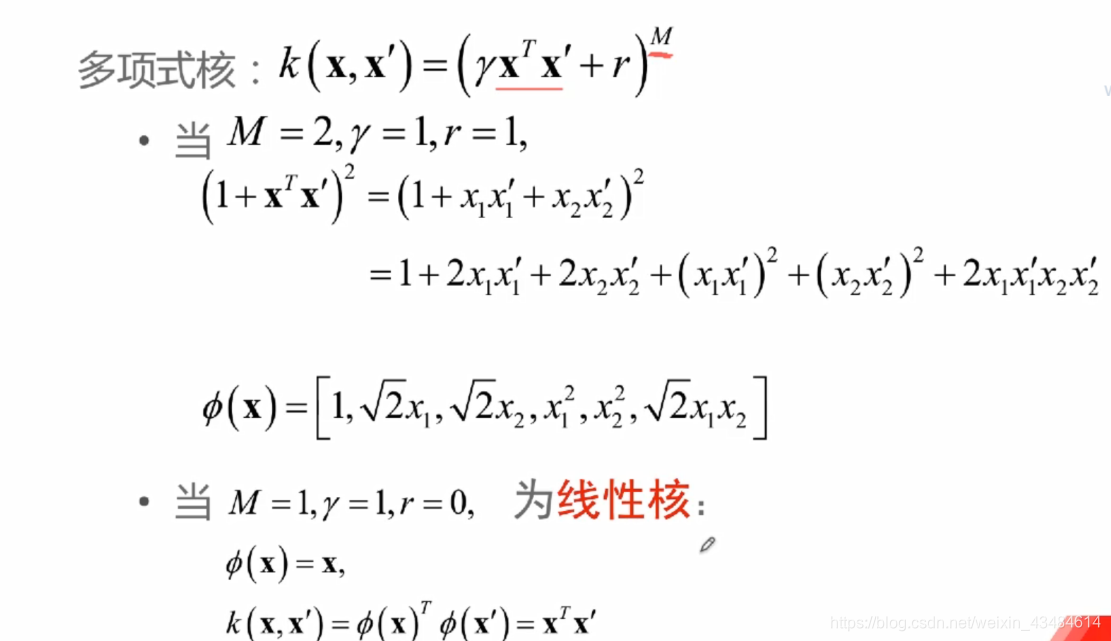 X和X’是原始空间的特征,粗略一看,还是要求点击啊,不是说求点击开销很大吗,最后不还是要求吗?多项式阶数越高,模型越复杂。
X和X’是原始空间的特征,粗略一看,还是要求点击啊,不是说求点击开销很大吗,最后不还是要求吗?多项式阶数越高,模型越复杂。
RBF核
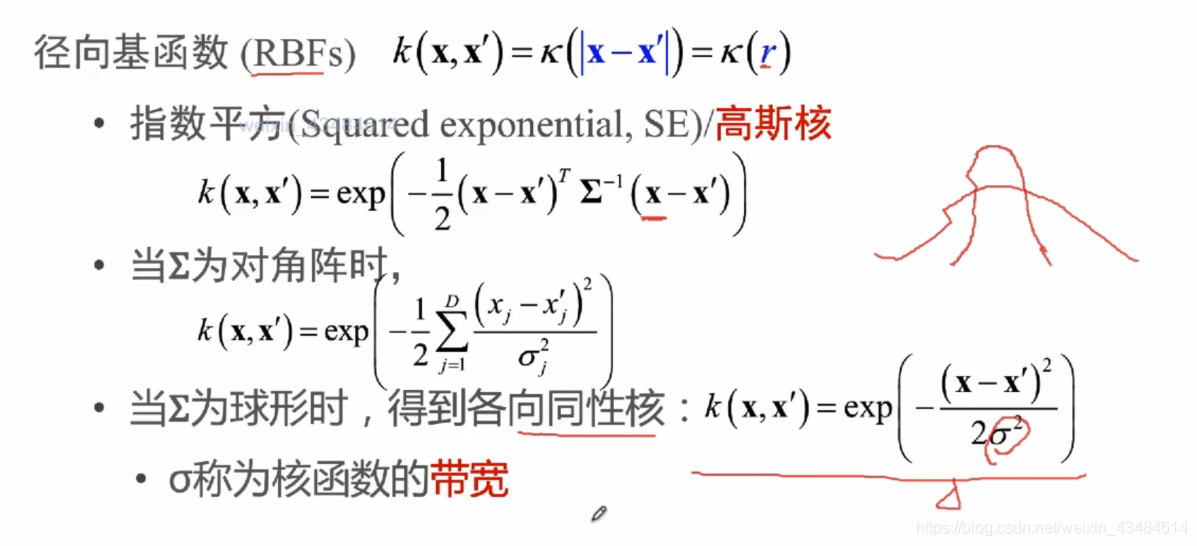
这里的
σ
\sigma
σ跟高斯分布就是有一定的关系。RBF核最常用,只能应用于数字,通过带宽可以变成任意一个复杂的函数(这句话不好理解啊),除此,还存在其他类型的核,比如sigmoid核、tanjian核等。
σ
\sigma
σ越大,模型越简单。
更多核函数
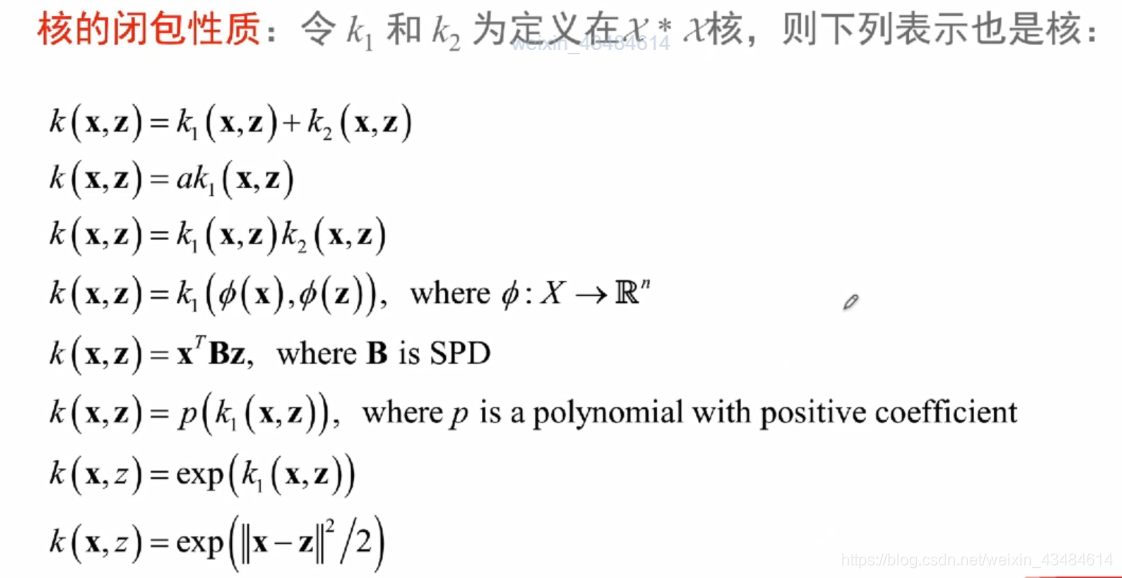 此处闭包的解释,进行上边那些运算后,得到的依然是核函数。
此处闭包的解释,进行上边那些运算后,得到的依然是核函数。
小结
σ
\sigma
σ越大,模型越简单,多项式阶数越高,模型越复杂。他们会严重影响到模型的性能。Logistic回归和线性回归,也可以通过核函数,得到非线性的模型。

















 5998
5998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









