







 作者分享了在调试矩阵寻迹小车过程中遇到的问题及解决方法,详细介绍了使用红外对管组成的点阵进行数据处理的算法,并通过Debug发现并修正了错误,使小车能够正常运行。
作者分享了在调试矩阵寻迹小车过程中遇到的问题及解决方法,详细介绍了使用红外对管组成的点阵进行数据处理的算法,并通过Debug发现并修正了错误,使小车能够正常运行。
言之者无罪,闻之者足以戒。 - “诗序”
上一篇文章说到已经实现了数据的读取和存储,今天我又自己调了一下,我发现自己之前一直不能控制车的运动,是因为我在实现数据处理的时候写的算法实现的语句写错了,所以总是不能让它正确的运动。今天我仔细的修改了自己的程序,现在小车已经能正常的运动了,剩下的就是对于小车速度的大小控制的问题了。
我用的数据的处理算法是参考别人的方法:
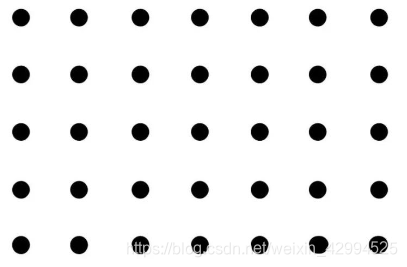
我用的是红外对管组成的五成七的点阵,这样车走起来比四路或者三路红外对管走起来稳的多。
算法的思路就是以四列为基准,我们检测黑线的左边沿和右边沿,之后左右边沿的和加起来除以2,之后前去4,然后我们根据数值的正负来判断小车应该怎么运动。
下面我们通过一张图来说明一下:
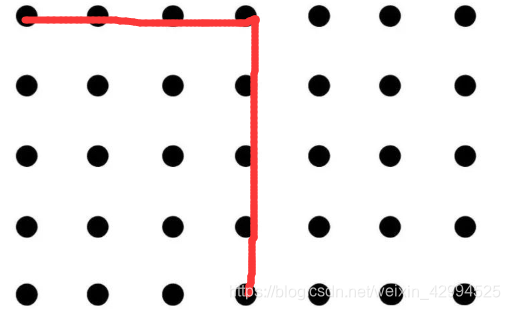
这张图上第一行的左边沿是第一列,右边沿是第四列,这样(1+4)/2等于2.5再减去四之后等于-1.5。下面的四行都以这种方式去计算,之后把五行计算的数据加起来得出一个数值,我们就是根据这个数值的大小来判断小车应该怎样行驶。
通过矩阵寻迹小车的代码编写,我意识到了Keil中Debug的重要性,可以说如果我没有尝试的去用Debug的话,我是不可能写出来的。从我第一次写完程序不能用之后,我就一直进行Debug,通过Debug我发现了自己很多的问题,我就是一遍一遍的Debug,一遍一遍的修改自己的代码,直到今天我才基本上算调出来。
下面看一下我的最新的数据处理的程序:
/*数据处理函数*/
void Data_Handling()
{
u8 i,j;
u8 sum_l[5] = {0},sum_r[5] = {0};
float sum[5] = {0};
if(Data_Flag == 1)
{
Data_Flag = 0;
for(j = 0;j < 5;j++)
{
Bit_Buf[0] = (Row_Col[j]) & (0X01);
Bit_Buf[1] = (Row_Col[j]) & (0X02);
Bit_Buf[2] = (Row_Col[j]) & (0X04);
Bit_Buf[3] = (Row_Col[j]) & (0X08);
Bit_Buf[4] = (Row_Col[j]) & (0X10);
Bit_Buf[5] = (Row_Col[j]) & (0X20);
Bit_Buf[6] = (Row_Col[j]) & (0X40);
if(Bit_Buf[0] != 0)
{
sum_l[j] = 0;
}
else
{
for(i = 0;i < 7;i++)
{
if(Bit_Buf[i] < Bit_Buf[i+1])
{
sum_l[j] = i+1;
break;
}
}
}
if(Bit_Buf[6] != 0)
{
sum_l[j] = 6;
}
else
{
for(i = 0;i < 7;i++)
{
if(Bit_Buf[i] > Bit_Buf[i+1])
{
sum_r[j] = i;
break;
}
}
}
sum[j] = (float)((sum_l[j] + sum_r[j])/2.0 - 3);
}
Sum_All = sum[0] + sum[1] + sum[2] + sum[3] + sum[4];
}
}
这就是我的数据处理函数,还有可以优化的地方。大家可以优化一下。

















 1286
1286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









