







非常感谢 Kin__Zhang 的B站视频以及代码解释。
可以在coursera课程中选择旁听下载代码。
附上链接:B站
\qquad
\qquad
优快云博客
视频1-4为week 1的内容。主要是Dijkstra算法和A*算法。个人感觉视频中讲解较为简单。我自己感觉还不错的两篇讲解文章:Dijkstra \qquad A*+Dijkstra
代码中TestScript1.m为测试用程序
map = false(10);
% Add an obstacle
map (1:3, 6) = true;
map (5:8, 6) = true
start_coords = [6, 2];
dest_coords = [4, 9];
%%
close all;
%分别是两个函数的入口
[route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords);
[route, numExpanded] = AStarGrid (map, start_coords, dest_coords);
Dijkstra
程序中前一部分就只说明下作用,代码中也带有注释,不详细介绍。
distanceFromStart和地图大小一样,每个点存储的是和地图对应的点到start的距离。初始化为inf,因为后续遍历时找的是min_dist。start点初始距离是0,因为要选择min_dist的点开始寻找。matlab中的sub2ind和ind2sub分别是将(i,j)转换为整个的第几个,注意matlab是竖着排列的 (应该是自己用的matlab不多,不太注意)
还有就是,程序中需要返回扩散的次数numExpended。
主循环:
while true
% Draw current map
%设置状态,分别是1-6,刚开始有说
map(start_node) = 5;
map(dest_node) = 6;
% make drawMapEveryTime = true if you want to see how the
% nodes are expanded on the grid. 用来看效果的
if (drawMapEveryTime)
image(1.5, 1.5, map);
grid on;
axis image;
drawnow;
end
% Find the node with the minimum distance
[min_dist, current] = min(distanceFromStart(:)); %min_dist为distaceFromStart中的最小值,current为索引(如果多个就是第一个)
%如果当前就是终点,或者最小值就是inf,表示遍历了所有的都没找到路径,也返回。
if ((current == dest_node) || isinf(min_dist))
break;
end;
% Update map 表示当前节点已经被访问。
map(current) = 3; % mark current node as visited
distanceFromStart(current) = Inf; % remove this node from further consideration
% Compute row, column coordinates of current node 返回节点的(i,j)。不过我没用到
[i, j] = ind2sub(size(distanceFromStart), current);
% *********************************************************************
% YOUR CODE BETWEEN THESE LINES OF STARS
% Visit each neighbor of the current node and update the map, distances
% and parent tables appropriately.
numExpanded = numExpanded+1; 计算次数+1
%把当前节点移除,在map中把其当做3,已经更新了
current_up = current-1;
current_down = current+1;
current_right = current+nrows;
current_left = current-nrows; %matlab中是竖着排列的,周围4个点
neighborhood = [current_up,current_down,current_right,current_left];
% current
% map
% 对周围的点判断三个条件,不是障碍物,在地图内,未遍历过 少判断了不是起点, still exists problem
% distanceFromStart
for i = 1:4
%首先判断是否在地图内,要不然后边操作没意义,也会因为不在0-max内报错
if((neighborhood(i)>0) && (neighborhood(i)<(nrows*ncols)))
%判断是否是障碍物,是否被遍历。是否是起点,这里判断是否是起点的原因是,后续的父节点那块。会导致,起点的父节点一直是起点
%是死循环了
if((map(neighborhood(i)) ~= 2) && map(neighborhood(i))~=3 && map(neighborhood(i))~=5 )
%Kin_Zhang博主的是用的当前节点的减去start_node,实际应该是当前点+1。因为障碍存在,实际的距离可能会大于这个计算结果。
if(distanceFromStart(neighborhood(i))>min_dist+1)
map(neighborhood(i)) = 4; % add on list 没写
%最后问题出在这,是因为前边已经把那个当前节点的距离改成Inf了,防止再次遍历,但是是不是可以放到这块进行
%用min_dist就行。
distanceFromStart(neighborhood(i)) = min_dist+1;
distanceFromStart(neighborhood(i))
%更新父节点
parent(neighborhood(i)) = current;
% parent
% map(neighborhood(i)) = 3;
% current
end
end
end
end
end
其中父节点每个点的值对应是上一个节点的位置。如图:
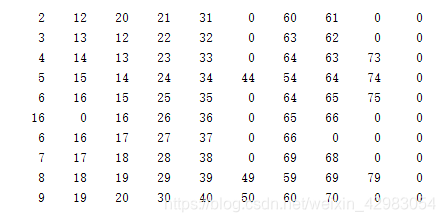
目标点的值是74,对应的应该去找第74个点,是64,再依次类推,直到为0。
以下程序是找父节点以及渲染用的
if (isinf(distanceFromStart(dest_node)))
route = [];
else
route = [dest_node];
while (parent(route(1)) ~= 0)
route = [parent(route(1)), route];
end
% Snippet of code used to visualize the map and the path
for k = 2:length(route) - 1
map(route(k)) = 7;
pause(0.3);
image(1.5, 1.5, map);
grid on;
axis image;
end
end
end
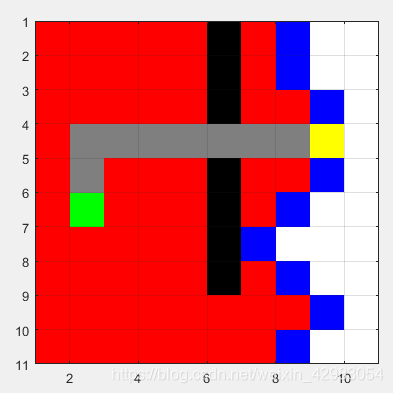
Dijkstra的示意图:(少了几帧)

A*算法
主要区别在于更新的值不一样,在Dijkstra中更新的是distanceFromStart,在A*中更新的是
f
f
f值
f
=
g
+
h
f = g+h
f=g+h
程序段
numExpanded = numExpanded + 1;
current_left = current - nrows;
current_right = current + nrows;
current_up = current - 1;
current_down = current + 1;
neighborhood = [current_up, current_right, current_down, current_left];
for i=1:4
current_next = neighborhood(i);
if(current_next>0&¤t_next<(nrows*ncols))
if(map(current_next)~=2 && map(current_next)~=3 && map(current_next)~=5)
g(current_next) = g(current) + 1;
if(f(current_next) > g(current_next) + H(current_next))
map(current_next) = 4;
f(current_next) = g(current_next) + H(current_next);
parent(current_next) = current;
end
end
end
end
示意图:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









