







一、简述
多视,可以是一个相机拍摄的多角度图像,也可以是很多相机拍摄的multi view图像,目标是按照马尔的理论重建三维结构,这是目前人类知识的边界,我们暂时认为人类的视觉认知是通过三维的逐层重建完成的,当然还有其他理论,但这是目前统治的看法。
二、原理
图片以及一些描述来自于:对极几何及单应矩阵
1、对极几何(Epipolar Geometry)
对极几何,用来描述的是如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机间的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。
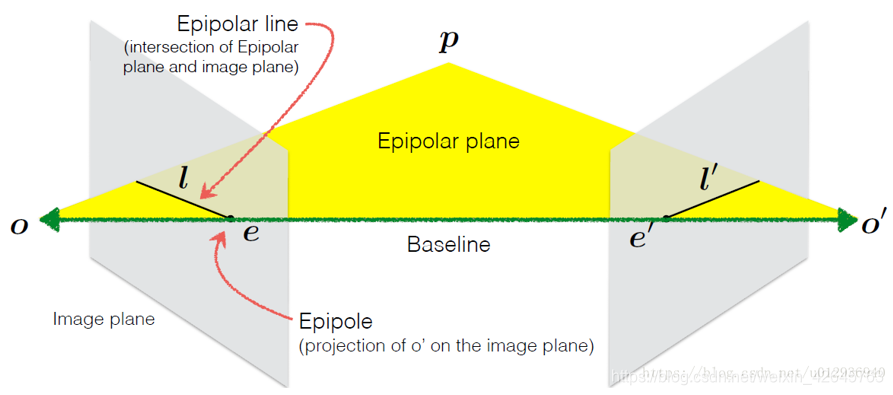
极点e和e’:e是左边相机中心在右图像平面上的投影,e’右相机中心在左像平面上的投影
极平面:两个相机中心和点p形成的平面
极线l和l’:极平面分别和两个像平面的交线
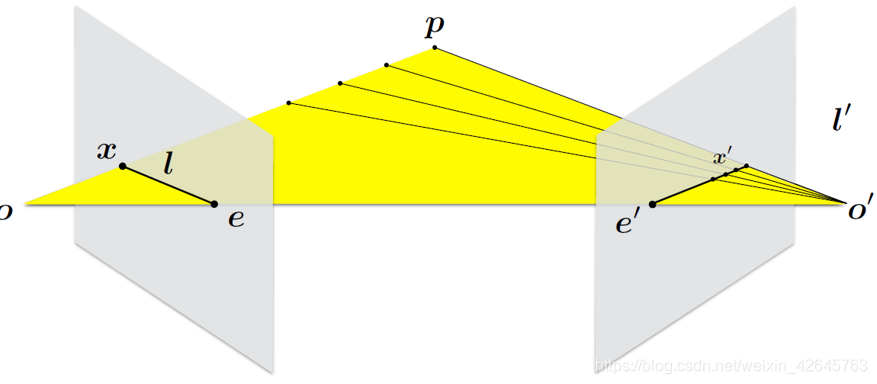
若其中一相机中心e分别与像平面交于ee’,o、o’、p已知,即不知道p点的深度信息的情况下,射线op是p点可能的空间位置,o’p的连线同另一个像平面的交点即为p对应在该平面上的位置,可知P点对应在另一个像平面上的位置总是会在一条直线上,即在极线l’上
2.本质矩阵的求解
对极约束是一个等式为零的约束,因此对他乘以非零常数后依然成立,这称为本质矩阵的尺度等价性。另一方面,由于平移和旋转各有三个自由度,故 E 共有六个自由度,但由于尺度等价性,因此实际上 E 具有5个自由度。
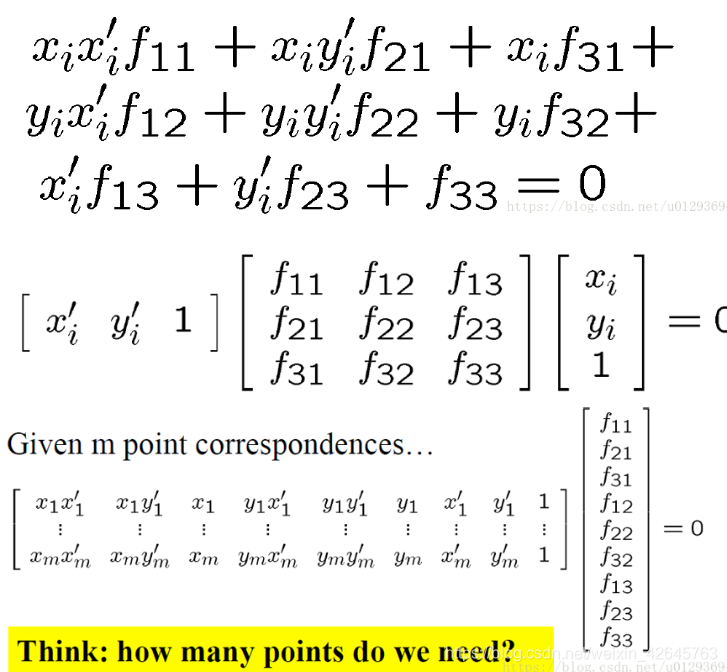
即最少可用5对点来求解 E,但是这种解法比较麻烦。考虑 E 的尺度等价性,可以使用8对点来求解,即经典的八点法,八点法利用了 E 的线性性质,因此可以通过线性代数求解。
3.八点法
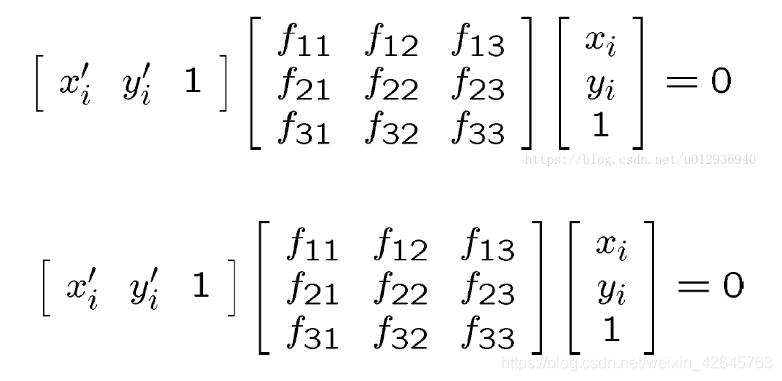
基本矩阵的定义为:
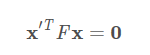
其中x↔x’是两幅图像的任意一对匹配点。由于每一组点的匹配提供了计算FF系数的一个线性方程,当给定至少7个点(3×3的齐次矩阵减去一个尺度,以及一个秩为2的约束),方程就可以计算出未知的F。
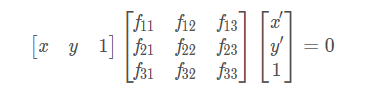
展开后有
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









