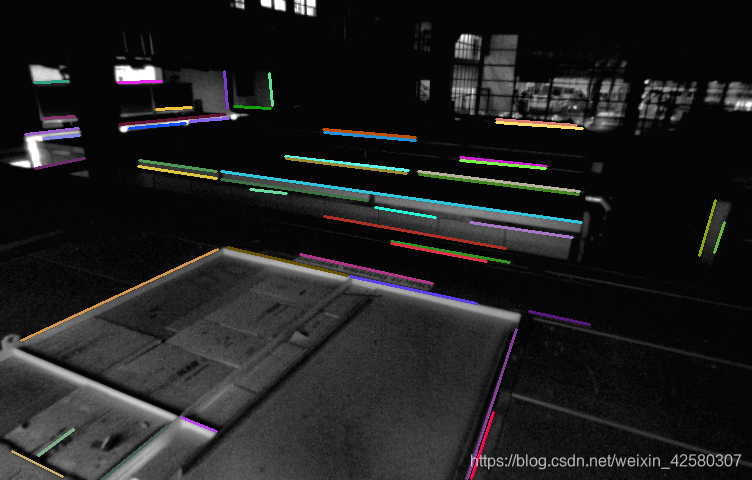
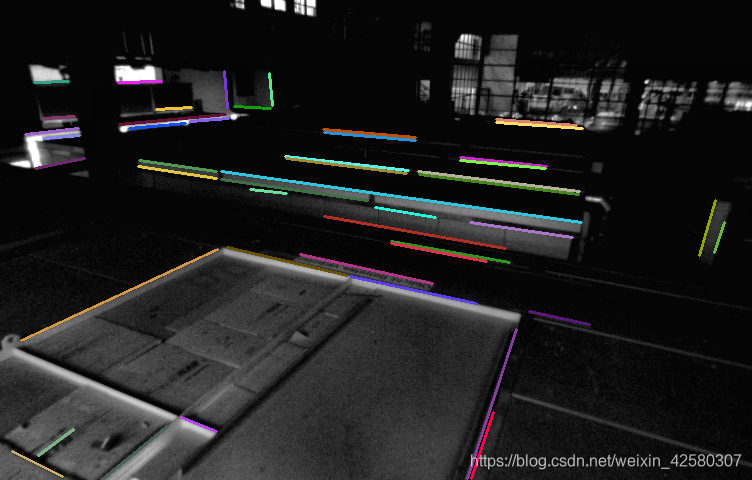
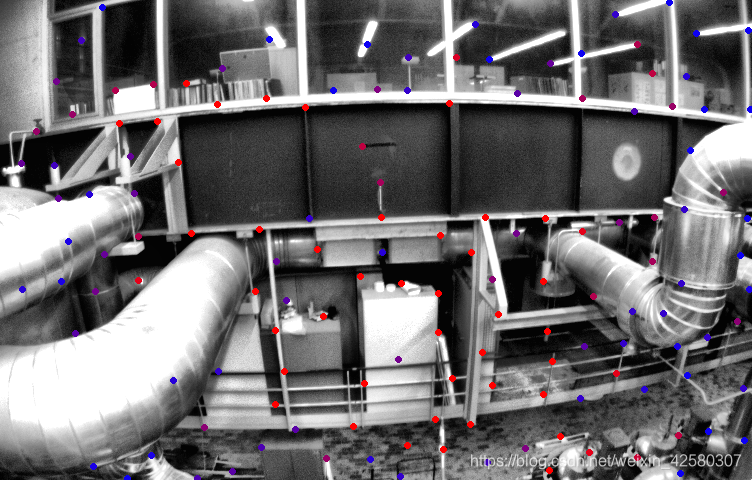
这是中科院自动化所贺一家博士在Sensors上的文章的开源代码,论文链接,代码链接https://github.com/HeYijia/PL-VIO。 第一步要解决的事情就是在自己的电脑上运行起来。按照贺博在readme部分给的步骤就可以。 Notice: ** Please play your bag with 0.2x speed since the time consuming from line detection. 结果如下: LSD_Matches1 LSD_Matches2 vis rviz 结果如上图所示,目前对每张图片的具体意义还不清楚,还需要看代码去了解。








 本文分享了中科院自动化所贺一家博士关于视觉惯性里程计(SLAM)的论文及开源代码。通过在Sensors期刊发表的文章,贺博士提供了PL-VIO项目的详细实现,并指导如何在本地计算机上运行代码。实验结果显示了LSD匹配和rviz可视化效果,为进一步理解每张图片的意义和代码细节奠定了基础。
本文分享了中科院自动化所贺一家博士关于视觉惯性里程计(SLAM)的论文及开源代码。通过在Sensors期刊发表的文章,贺博士提供了PL-VIO项目的详细实现,并指导如何在本地计算机上运行代码。实验结果显示了LSD匹配和rviz可视化效果,为进一步理解每张图片的意义和代码细节奠定了基础。
 rviz
rviz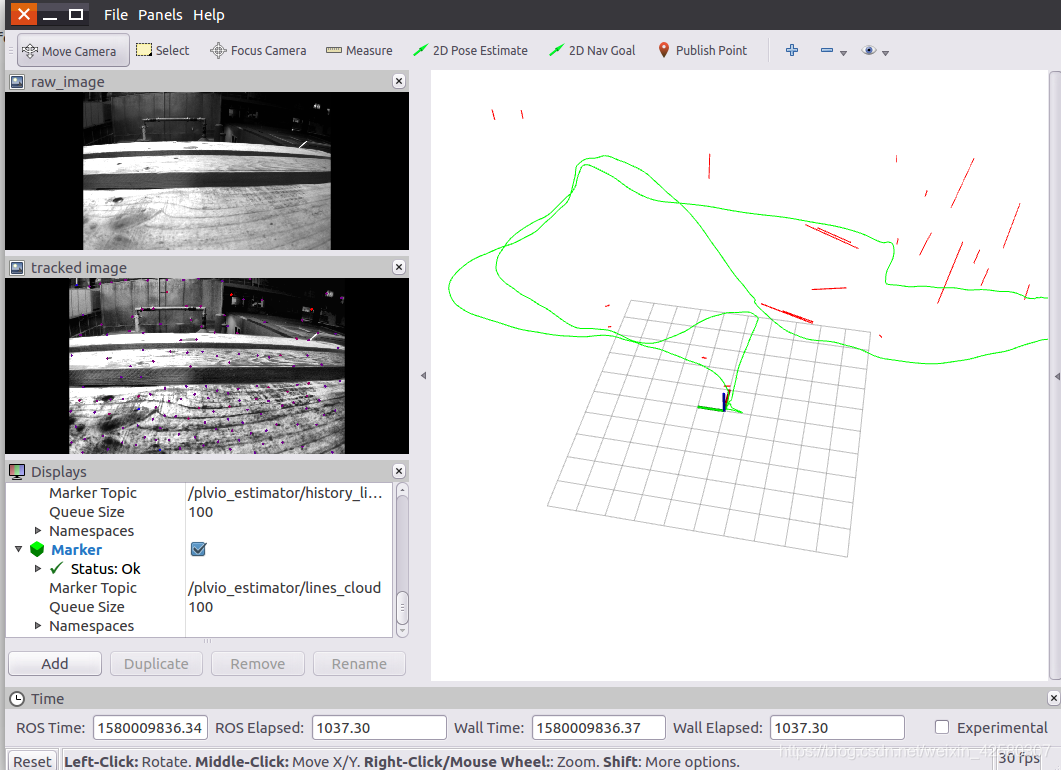 结果如上图所示,目前对每张图片的具体意义还不清楚,还需要看代码去了解。
结果如上图所示,目前对每张图片的具体意义还不清楚,还需要看代码去了解。
















 3268
3268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









