




 本文深入探讨AutoSAR的基础软件层(BSW),包括服务层、ECU抽象层、硬件抽象层(MCAL)和复杂驱动层(CDD)。讲解了各层的功能、组成及其实现细节,如I/O功能、通信功能、存储功能等,以及它们如何共同协作,为汽车电子系统提供稳定可靠的运行环境。
本文深入探讨AutoSAR的基础软件层(BSW),包括服务层、ECU抽象层、硬件抽象层(MCAL)和复杂驱动层(CDD)。讲解了各层的功能、组成及其实现细节,如I/O功能、通信功能、存储功能等,以及它们如何共同协作,为汽车电子系统提供稳定可靠的运行环境。
汽车电子学习笔记—AutoSAR之基础软件层(BSW)
- 1、概述
如之前autosar概述笔记中说明,BSW按照层级结构可以分为服务层、ECU抽象层、硬件抽象层(MCAL)和复杂驱动层(CDD)。
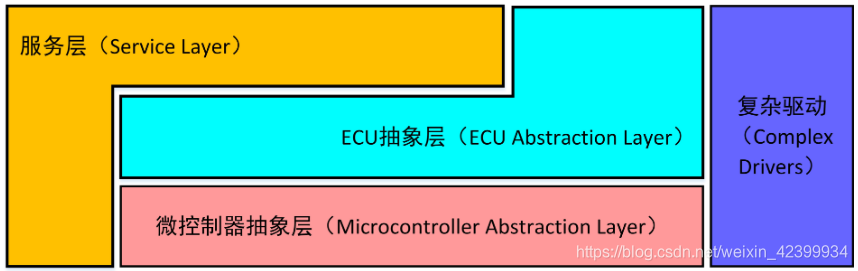
- 硬件抽象层(MCAL)
主要包含了相关的Driver,通过该层次可以访问MCU的资源,比如访问整个芯片的CAN,LIN等控制器,配置MCU的Port脚,配置MCU的时钟等。主要包含下面的内容: MCU,PORT,DIO,ADC,SPI,CAN,LIN,FLEXRAY,PWM,ICU,OCU等
- ECU抽象层
底层驱动的抽象,同时它也是外设的驱动,它提供了可以访问外设和底层MCU的接口,该层次主要包含了下面的内容:CanIf,Can Transceiver Driver, MemIf, Fee, Ea, External Flash/EEPROM Driver, WdgIf等
- 服务层
包含操作系统的功能、车辆网络通信管理服务、存储器服务(NVRAM管理)、诊断服务(包括UDS通信、错误存储和故障处理)、ECU状态管理,模式管理、逻辑和时间程序流监控(Wdg管理器)、密码服务(密码服务管理)、调度管理(Schedule Manager)
- 复杂驱动
跨越于微控制器硬件层和RTE之间,其主要任务是整合具有特殊目的且不能用MCAL进行配置的非标准功能模块,将该部分功能嵌入到AUTOSAR基础软件层中,从而实现处理复杂传感器以及执行器的特定功能和时间要求。复杂驱动程序跟单片机和ECU硬件紧密相关。其上层程序接口是根据AUTOSAR指定并且实施的;其下层程序接口受标准接口程序的限制。复杂驱动可以使用特定的中断或是复杂的微控制器外设(如PCP/TPU)来直接访问微控制器,从而实现对复杂传感器的评估和执行器的控制,比如喷油控制,电磁阀控制,增量位置检测等
- 2、详细描述
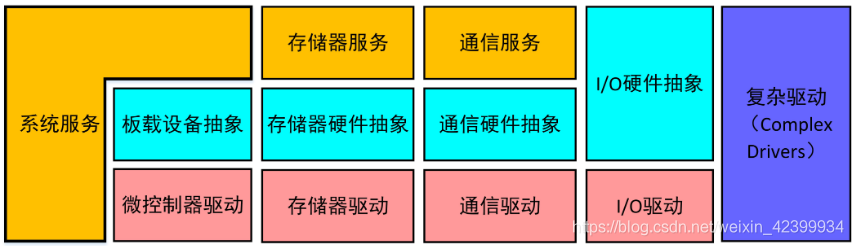
- I/O功能
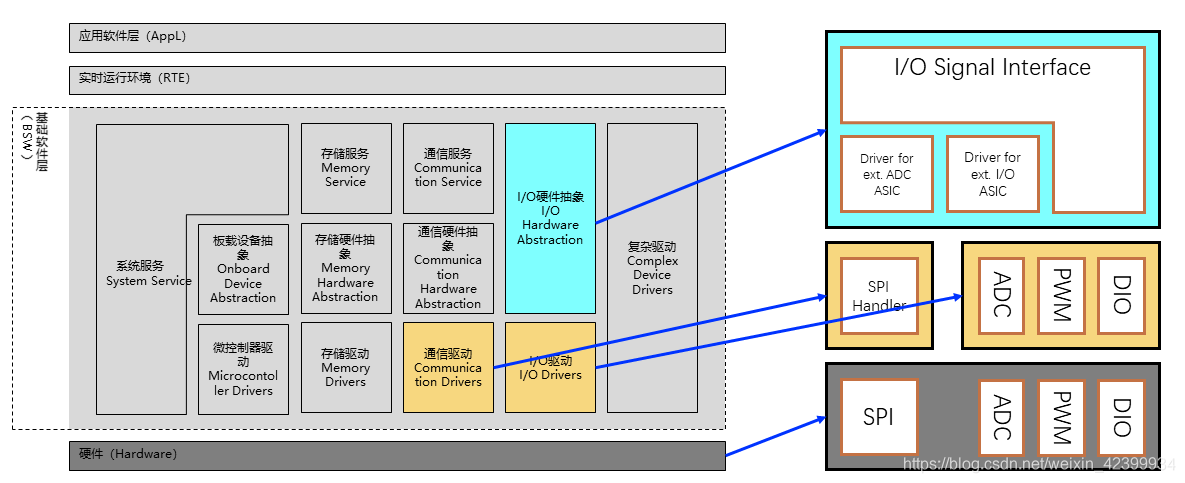
功能包括了DIO(数字输入输出)、ADC和PWM等
-
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1650
1650





 到【灌水乐园】发言
到【灌水乐园】发言







