




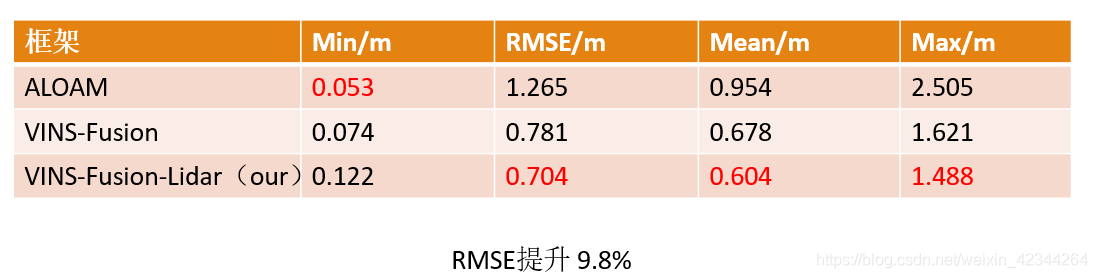
 本文通过使用Cartographer作为真值,评估了单目VINS-Fusion及VINS-Fusion-Lidar在长走廊数据集上的定位精度。结果显示,两种方法均存在尺度漂移现象,而ALOAM在XY平面上表现较好,但Z轴误差较大。未来工作将考虑融合激光里程计因子以提高精度。
本文通过使用Cartographer作为真值,评估了单目VINS-Fusion及VINS-Fusion-Lidar在长走廊数据集上的定位精度。结果显示,两种方法均存在尺度漂移现象,而ALOAM在XY平面上表现较好,但Z轴误差较大。未来工作将考虑融合激光里程计因子以提高精度。
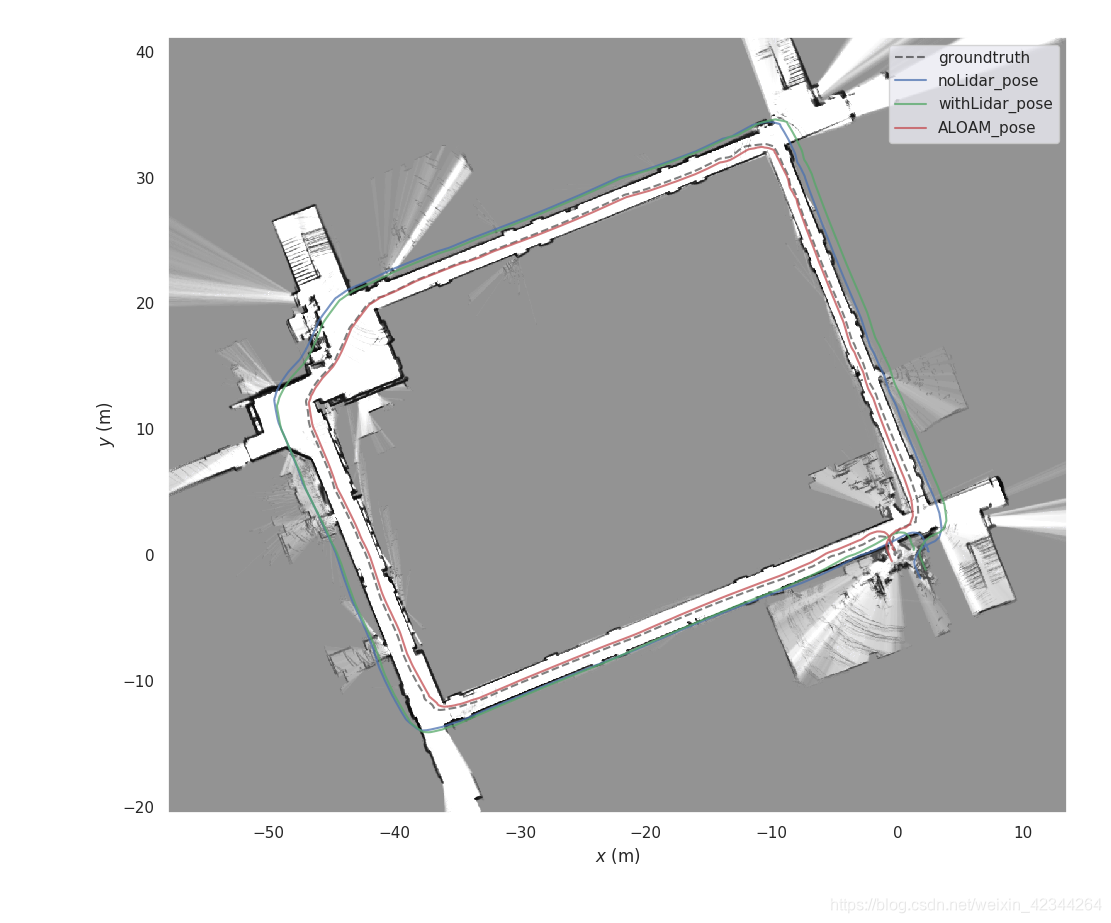
摘要:长走廊数据集,使用cartographer结果作为真值,评估视觉和雷达融合(VINS-Fusion-Lidar)的精度。框架:vins-fusion、vins-fusion-lidar、aloam
一、配置cartographer参数
my_robot_3d.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "mynteye_imu_frame",
published_frame = "base_link",
odom_frame = "base_link",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 1
TRAJECTORY_BUILDER_2D.min_range = 1
--TRAJECTORY_BUILDER_2D.min_z = 0
--TRAJECTORY_BUILDER_2D.adaptive_voxel_filter.min_num_points=500
--TRAJECTORY_BUILDER_2D.ceres_scan_matcher.rotation_weight = 1e7
--TRAJECTORY_BUILDER_2D.ceres_scan_matcher.translation_weight = 1
TRAJECTORY_BUILDER_2D.imu_gravity_time_constant = .1
--TRAJECTORY_BUILDER_2D.submaps.num_range_data = 200
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
--TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1
--POSE_GRAPH.optimize_every_n_nodes = 0
return options
my_robot_3d.launch
<launch>
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/why_robot_3d.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename why_robot_3d.lua"
output="screen">
<remap from="points2" to="/rslidar_points" />
<remap from="imu" to="/mynteye/imu/data_raw" />
<!-- <remap from="points2_2" to="vertical_laser_3d" /> -->
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
my_robot_3d.urdf
<robot name="why_sensor">
<material name="orange">
<color rgba="1.0 0.5 0.2 1" />
</material>
<material name="gray">
<color rgba="0.2 0.2 0.2 1" />
</material>
<link name="mynteye_imu_frame">
<visual>
<origin xyz="0.0 0.0 0.0" />
<geometry>
<box size="0.06 0.04 0.02" />
</geometry>
<material name="orange" />
</visual>
</link>
<link name="rslidar">
<visual>
<origin xyz="0.0 0.0 0.0" />
<geometry>
<cylinder length="0.07" radius="0.05" />
</geometry>
<material name="gray" />
</visual>
</link>
<link name="why_sensor" />
<link name="base_link" />
<!-- Legacy data -->
<link name="why" />
<joint name="why_link_joint_legacy" type="fixed">
<parent link="base_link" />
<child link="why" />
<origin xyz="0.00 0. 0.03618" rpy="0. 0 0" />
</joint>
<joint name="sensor_link_joint" type="fixed">
<parent link="base_link" />
<child link="why_sensor" />
<origin xyz="0 0 0" rpy="0 0 0" />
</joint>
<joint name="imu_link_joint" type="fixed">
<parent link="why_sensor" />
<child link="mynteye_imu_frame" />
<origin xyz="0.006253 -0.011775 0.007645" rpy="0 0 0" />
</joint>
<joint name="why_link_joint" type="fixed">
<parent link="why_sensor" />
<child link="rslidar" />
<origin xyz="0.0 0.0 0.03618" rpy="0 0 3.14159" />
</joint>
</robot>
最终结果
二、结过分析
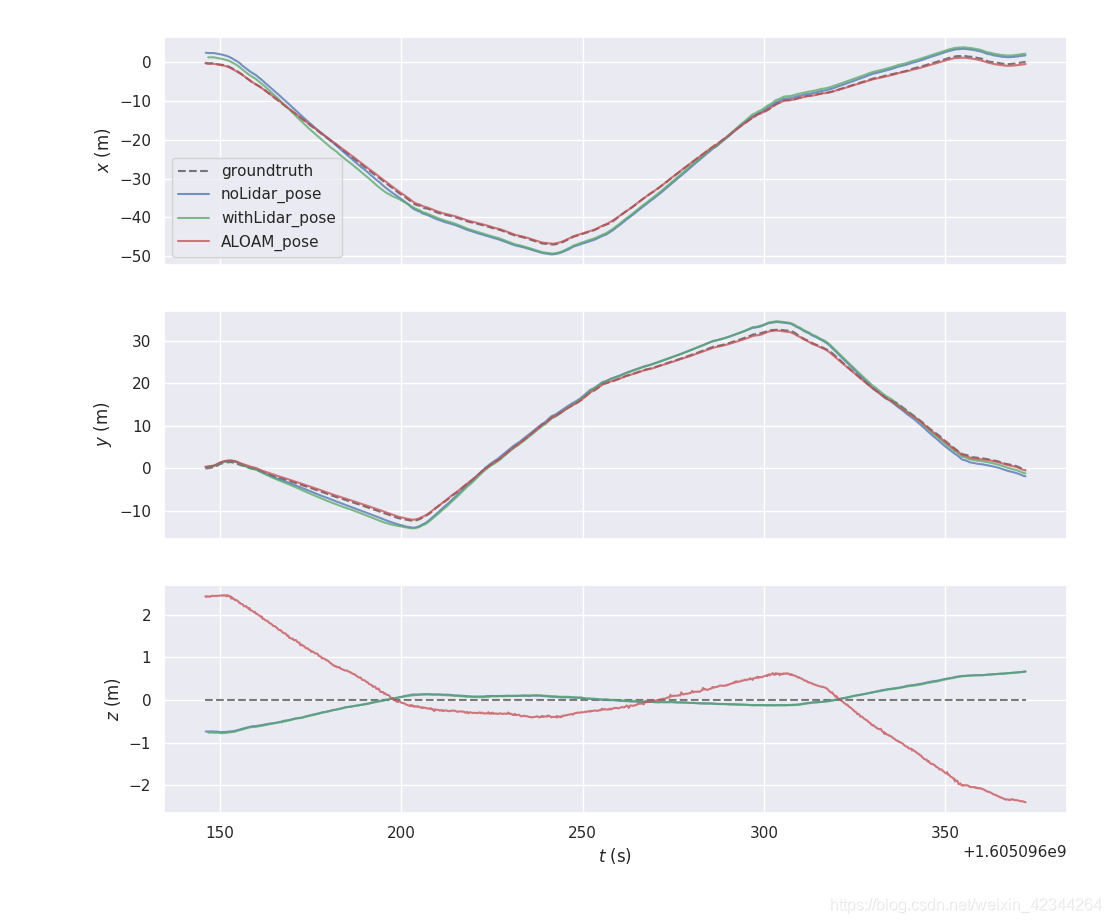
- 1、单目VINS-Fusion和 VINS-Fusion-Lidar都有一定的尺度飘移,与匀速状态下IMU退化有关
- 2、ALOAM在xy平面误差较小,但是z轴误差相对较大,目前原因未知
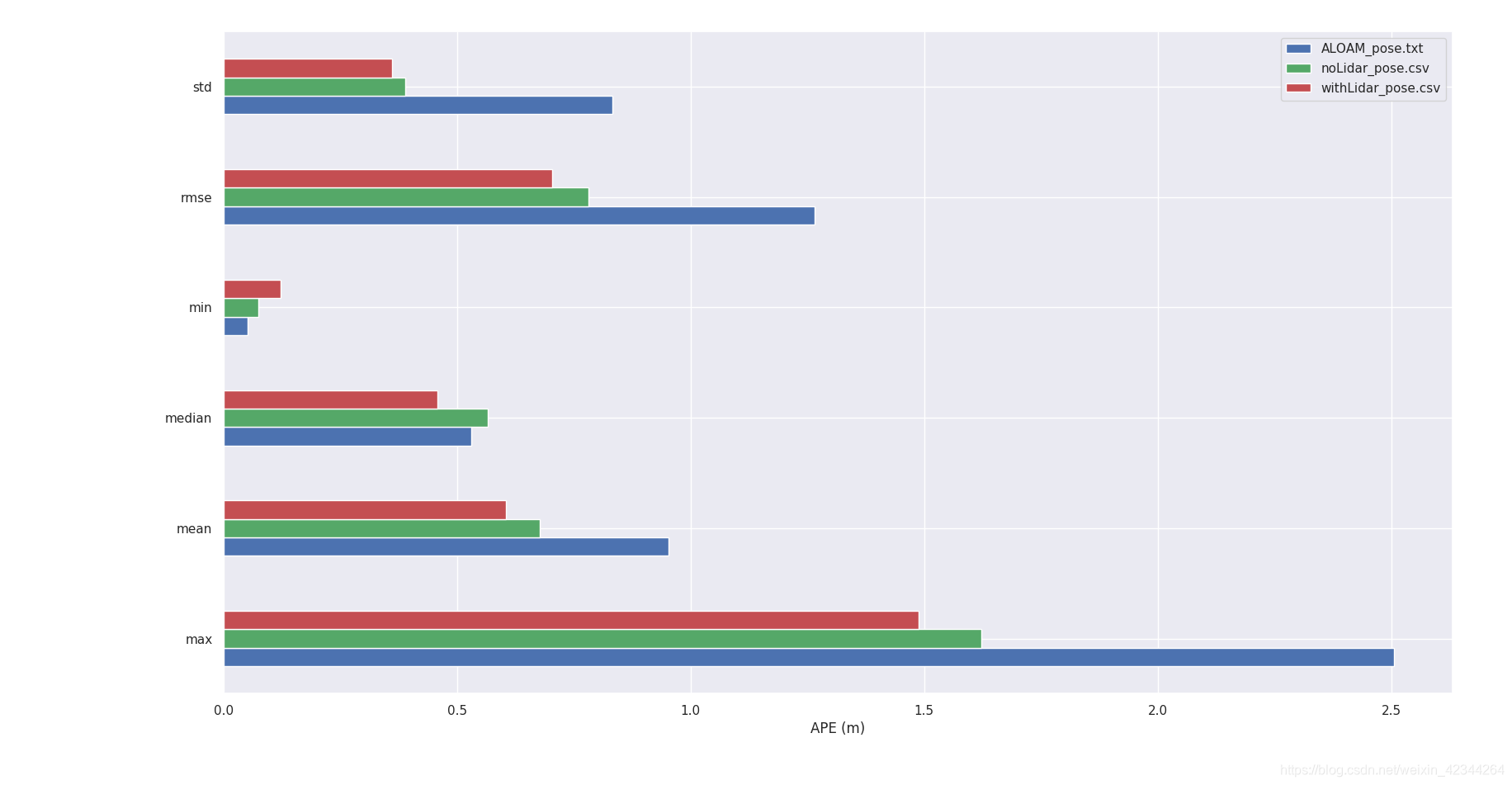
- 3、关联深度之后精度有一定提升,后面继续融合激光里程计因子到VINS-Fusion-Lidar

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









