







 本文介绍了VisionPro工业视觉的四种标定方法:计算像素比、相机固定移动平台动标定、相机移动物体固定标定和使用标定板进行标定。详细讲解了每种方法的步骤和精度,并分享了实用的低成本标定技巧。
本文介绍了VisionPro工业视觉的四种标定方法:计算像素比、相机固定移动平台动标定、相机移动物体固定标定和使用标定板进行标定。详细讲解了每种方法的步骤和精度,并分享了实用的低成本标定技巧。
今天给大家介绍下工业视觉常用的几种标定方式。
VisionPro工业视觉的标定方法介绍
标定这个词的意思就是为了将相机拍出来的图像坐标系的像素单位与咱们正常人类用的单位匹配起来,找到它们之间的关系,好将像素转换为我们能读懂的数据。
计算像素比
有些时候我们需要的检测数据并不需要特别准确,并且手边没有其它标定工具,可以使用这种方法大概算一算每个像素对应多大距离。
找一个知道距离的物体,测出它的像素距离,像素比例=被测物体距离÷像素大小
相机固定移动平台动的标定
这种方式需要被测物体固定在可以改变位置的移动平台上,比如cnc机台。
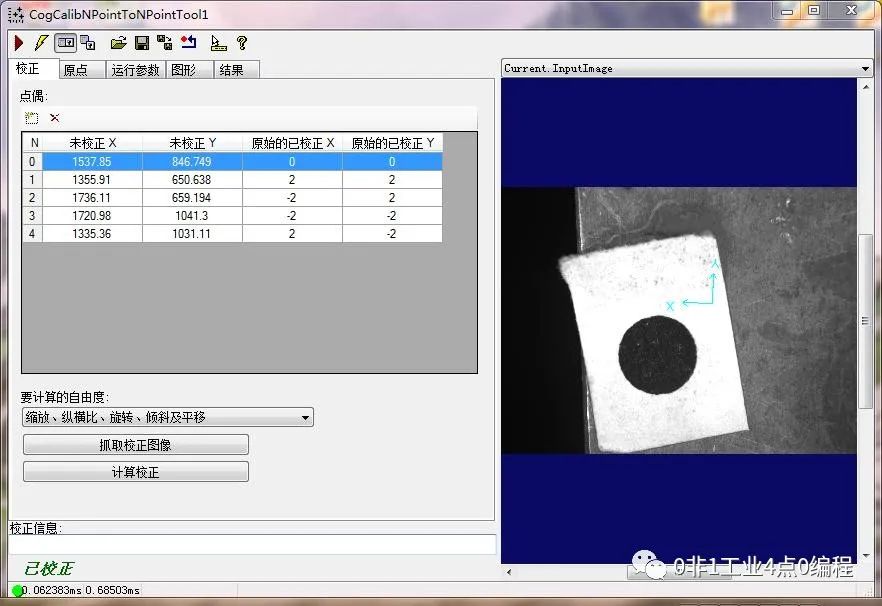
采用5点标定法,在物体所在图像中心拍照取一个点,命名为(0,0),记录其像素坐标。再相对于这个原点(0,0)在四个象限内各取一个点(2,2),(-2,2)(-2,-2)(2,-2)分别取得其对应像素坐标值,将这5组数据填入到 CogCalibNPointToNPointTool点对点标定工具中,运行工具,可以在结果中看到一个RMS误差值,这个值越小,标定越精确,一般1以下就能达到μ级别的精度。
相机移动物体固定的标定
这种方式一般出现在机械手取放物料时用到
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7832
7832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









