




0 问题描述
在回放Bag数据的时候,出现警告信息:Warning: TF_OLD_DATA ignoring data from the past for frame stm32_imu at time 1.6203e+09 according to authority unknown_publisher Possible reasons are listed at http://wiki.ros.org/tf/Errors%20explained at line 277 in /tmp/binarydeb/ros-kinetic-tf2-0.5.20/src/buffer_core.cpp
大意即为TF数据因较旧而被忽略,出现这种情况有可能会导致bag包中的TF变换无法进行,以及相应的传感器数据无法正确显示,如下图所示的激光数据。
1 解决
通过调整ROS环境参数调整使用的时钟:
rosparam set /use_sim_time true
然后在播放bag数据时使用参数--clock.
** --clock** 参数即是使环境使用sim time,如果在启动其他节点前使用了该参数,系统会自动适用,否则,需要确保先启动的节点更改了该参数。
最后,启动你的需要的节点;如果不行,请关闭整个ros环境后重新启动。
2 参考
ROS Wiki中的解释:
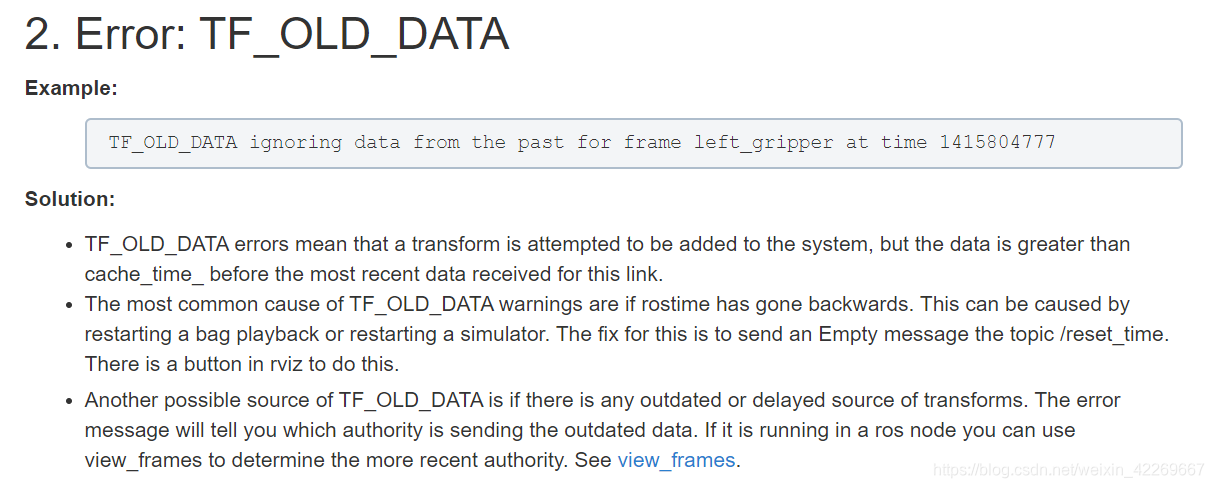
提到的即为时钟问题,可以通过重启bag或者Rviz中的reset_time键来重置。
下图为Ros Answer中关于--clock的解释。

















 2475
2475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









