






CUDA线程协作
教材《GPU高性能编程CUDA实战》第五章 线程协作
一、并行线程块的分解
1.矢量求和:使用线程实现GPU上的矢量求和
//重新回顾矢量求和 : 一个线程块N个线程
#include "book.h"
#include "cuda_runtime.h"
#include "device_launch_parameters.h"//包含blockIdx.x
#define N 10
__global__ void add( int *a, int *b, int *c ) {
int tid = threadIdx.x;//线程索引
if (tid < N)
c[tid] = a[tid] + b[tid];
}
int main( void ) {
int a[N], b[N], c[N];
int *dev_a, *dev_b, *dev_c;
// allocate the memory on the GPU
HANDLE_ERROR( cudaMalloc( (void**)&dev_a, N * sizeof(int) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_b, N * sizeof(int) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_c, N * sizeof(int) ) );
// fill the arrays 'a' and 'b' on the CPU
for (int i=0; i<N; i++) {
a[i] = i;
b[i] = i * i;
}
// copy the arrays 'a' and 'b' to the GPU
HANDLE_ERROR( cudaMemcpy( dev_a, a, N * sizeof(int),cudaMemcpyHostToDevice ) );
HANDLE_ERROR( cudaMemcpy( dev_b, b, N * sizeof(int),cudaMemcpyHostToDevice ) );
add<<<1,N>>>( dev_a, dev_b, dev_c );//1个线程块N个线程
// copy the array 'c' back from the GPU to the CPU
HANDLE_ERROR( cudaMemcpy( c, dev_c, N * sizeof(int),cudaMemcpyDeviceToHost ) );
// display the results
for (int i=0; i<N; i++) {
printf( "%d + %d = %d\n", a[i], b[i], c[i] );
}
// free the memory allocated on the GPU
HANDLE_ERROR( cudaFree( dev_a ) );
HANDLE_ERROR( cudaFree( dev_b ) );
HANDLE_ERROR( cudaFree( dev_c ) );
return 0;
}2.在GPU上对任意长度的矢量求和
//在GPU上任意长度的矢量求和
#include "book.h"
#include "cuda_runtime.h"
#include "device_launch_parameters.h"//包含blockIdx.x
#define N (33 * 1024)
__global__ void add( int *a, int *b, int *c ) {
int tid = threadIdx.x + blockIdx.x * blockDim.x;
while (tid < N) {
c[tid] = a[tid] + b[tid];
tid += blockDim.x * gridDim.x;
//递增的步长是线程格中正在运行的线程数量=线程块中的线程数量*线程格中的线程块数量
}
}
int main( void ) {
int *a, *b, *c;
int *dev_a, *dev_b, *dev_c;
// allocate the memory on the CPU
a = (int*)malloc( N * sizeof(int) );
b = (int*)malloc( N * sizeof(int) );
c = (int*)malloc( N * sizeof(int) );
// allocate the memory on the GPU
HANDLE_ERROR( cudaMalloc( (void**)&dev_a, N * sizeof(int) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_b, N * sizeof(int) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_c, N * sizeof(int) ) );
// fill the arrays 'a' and 'b' on the CPU
for (int i=0; i<N; i++) {
a[i] = i;
b[i] = 2 * i;
}
// copy the arrays 'a' and 'b' to the GPU
HANDLE_ERROR( cudaMemcpy( dev_a, a, N * sizeof(int),cudaMemcpyHostToDevice ) );
HANDLE_ERROR( cudaMemcpy( dev_b, b, N * sizeof(int),cudaMemcpyHostToDevice ) );
add<<<128,128>>>( dev_a, dev_b, dev_c );
// copy the array 'c' back from the GPU to the CPU
HANDLE_ERROR( cudaMemcpy( c, dev_c, N * sizeof(int),cudaMemcpyDeviceToHost ) );
// verify that the GPU did the work we requested
bool success = true;
for (int i=0; i<N; i++) {
if ((a[i] + b[i]) != c[i]) {
printf( "Error: %d + %d != %d\n", a[i], b[i], c[i] );
success = false;
}
}
if (success) printf( "We did it!\n" );
// free the memory we allocated on the GPU
HANDLE_ERROR( cudaFree( dev_a ) );
HANDLE_ERROR( cudaFree( dev_b ) );
HANDLE_ERROR( cudaFree( dev_c ) );
// free the memory we allocated on the CPU
free( a );
free( b );
free( c );
return 0;
}3.在GPU上使用线程实现波纹效果
#include "book.h"
#include "cpu_anim.h"
#include "cuda_runtime.h"
#include "device_launch_parameters.h"//包含blockIdx.x
#define DIM 1024
#define PI 3.1415926535897932f
__global__ void kernel( unsigned char *ptr, int ticks ) {
// map from threadIdx/BlockIdx to pixel position
//x,y是线程在线程块中的索引转换成在图形中的唯一索引
int x = threadIdx.x + blockIdx.x * blockDim.x;
int y = threadIdx.y + blockIdx.y * blockDim.y;
//对x和y进行线性化,从二维索引空间转到线性空间
int offset = x + y * blockDim.x * gridDim.x;
// now calculate the value at that position
float fx = x - DIM/2;
float fy = y - DIM/2;
float d = sqrtf( fx * fx + fy * fy );
unsigned char grey = (unsigned char)(128.0f + 127.0f * cos(d/10.0f - ticks/7.0f) /(d/10.0f + 1.0f));
ptr[offset*4 + 0] = grey;
ptr[offset*4 + 1] = grey;
ptr[offset*4 + 2] = grey;
ptr[offset*4 + 3] = 255;
}
struct DataBlock {
unsigned char *dev_bitmap;
CPUAnimBitmap *bitmap;
};
void generate_frame( DataBlock *d, int ticks ) {
dim3 blocks(DIM/16,DIM/16);
dim3 threads(16,16);
kernel<<<blocks,threads>>>( d->dev_bitmap, ticks );
HANDLE_ERROR( cudaMemcpy( d->bitmap->get_ptr(),d->dev_bitmap,d->bitmap->image_size(),cudaMemcpyDeviceToHost ) );
}
// clean up memory allocated on the GPU
void cleanup( DataBlock *d ) {
HANDLE_ERROR( cudaFree( d->dev_bitmap ) );
}
int main( void ) {
DataBlock data;
CPUAnimBitmap bitmap( DIM, DIM, &data );
data.bitmap = &bitmap;
HANDLE_ERROR( cudaMalloc( (void**)&data.dev_bitmap,bitmap.image_size() ) );
bitmap.anim_and_exit( (void (*)(void*,int))generate_frame, (void (*)(void*))cleanup );
}波纹效果图:
二、共享内存和线程同步
1.点积计算
#include "book.h"
#include "cuda_runtime.h"
#include "device_launch_parameters.h"//包含blockIdx.x
#define imin(a,b) (a<b?a:b)
const int N = 33 * 1024;
const int threadsPerBlock = 256;
const int blocksPerGrid =imin( 32, (N+threadsPerBlock-1) / threadsPerBlock );
__global__ void dot( float *a, float *b, float *c ) {
__shared__ float cache[threadsPerBlock];
int tid = threadIdx.x + blockIdx.x * blockDim.x;
int cacheIndex = threadIdx.x;
float temp = 0;
while (tid < N) {
temp += a[tid] * b[tid];
tid += blockDim.x * gridDim.x;
}
// set the cache values
cache[cacheIndex] = temp;
// synchronize threads in this block
__syncthreads();//报红是因为vs没有识别,不用管
// for reductions, threadsPerBlock must be a power of 2
// because of the following code
int i = blockDim.x/2;
while (i != 0) {
if (cacheIndex < i)
cache[cacheIndex] += cache[cacheIndex + i];
__syncthreads();
i /= 2;
}
if (cacheIndex == 0)
c[blockIdx.x] = cache[0];
}
int main( void ) {
float *a, *b, c, *partial_c;
float *dev_a, *dev_b, *dev_partial_c;
// allocate memory on the cpu side
a = (float*)malloc( N*sizeof(float) );
b = (float*)malloc( N*sizeof(float) );
partial_c = (float*)malloc( blocksPerGrid*sizeof(float) );
// allocate the memory on the GPU
HANDLE_ERROR( cudaMalloc( (void**)&dev_a, N*sizeof(float) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_b, N*sizeof(float) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_partial_c, blocksPerGrid*sizeof(float) ) );
// fill in the host memory with data
for (int i=0; i<N; i++) {
a[i] = i;
b[i] = i*2;
}
// copy the arrays 'a' and 'b' to the GPU
HANDLE_ERROR( cudaMemcpy( dev_a, a, N*sizeof(float),cudaMemcpyHostToDevice ) );
HANDLE_ERROR( cudaMemcpy( dev_b, b, N*sizeof(float), cudaMemcpyHostToDevice ) );
dot<<<blocksPerGrid,threadsPerBlock>>>( dev_a, dev_b,dev_partial_c );
// copy the array 'c' back from the GPU to the CPU
HANDLE_ERROR( cudaMemcpy( partial_c, dev_partial_c,blocksPerGrid*sizeof(float),cudaMemcpyDeviceToHost ) );
// finish up on the CPU side
c = 0;
for (int i=0; i<blocksPerGrid; i++) {
c += partial_c[i];
}
#define sum_squares(x) (x*(x+1)*(2*x+1)/6)
printf( "Does GPU value %.6g = %.6g?\n", c,2 * sum_squares( (float)(N - 1) ) );
// free memory on the gpu side
HANDLE_ERROR( cudaFree( dev_a ) );
HANDLE_ERROR( cudaFree( dev_b ) );
HANDLE_ERROR( cudaFree( dev_partial_c ) );
// free memory on the cpu side
free( a );
free( b );
free( partial_c );
}编译运行:
2.基于共享内存的位图
#include "book.h"
#include "cpu_bitmap.h"
#include "cuda_runtime.h"
#include "device_launch_parameters.h"//包含blockIdx.x
#define DIM 1024
#define PI 3.1415926535897932f
__global__ void kernel( unsigned char *ptr ) {
// map from threadIdx/BlockIdx to pixel position
int x = threadIdx.x + blockIdx.x * blockDim.x;
int y = threadIdx.y + blockIdx.y * blockDim.y;
int offset = x + y * blockDim.x * gridDim.x;
__shared__ float shared[16][16];
// now calculate the value at that position
const float period = 128.0f;
shared[threadIdx.x][threadIdx.y] = 255 * (sinf(x*2.0f*PI/ period) + 1.0f) *(sinf(y*2.0f*PI/ period) + 1.0f) / 4.0f;
// removing this syncthreads shows graphically what happens
// when it doesn't exist. this is an example of why we need it.
__syncthreads();//线程同步
ptr[offset*4 + 0] = 0;
ptr[offset*4 + 1] = shared[15-threadIdx.x][15-threadIdx.y];
ptr[offset*4 + 2] = 0;
ptr[offset*4 + 3] = 255;
}
// globals needed by the update routine
struct DataBlock {
unsigned char *dev_bitmap;
};
int main( void ) {
DataBlock data;
CPUBitmap bitmap( DIM, DIM, &data );
unsigned char *dev_bitmap;
HANDLE_ERROR( cudaMalloc( (void**)&dev_bitmap,bitmap.image_size() ) );
data.dev_bitmap = dev_bitmap;
dim3 grids(DIM/16,DIM/16);
dim3 threads(16,16);
kernel<<<grids,threads>>>( dev_bitmap );
HANDLE_ERROR( cudaMemcpy( bitmap.get_ptr(), dev_bitmap,bitmap.image_size(),cudaMemcpyDeviceToHost ) );
HANDLE_ERROR( cudaFree( dev_bitmap ) );
bitmap.display_and_exit();
}
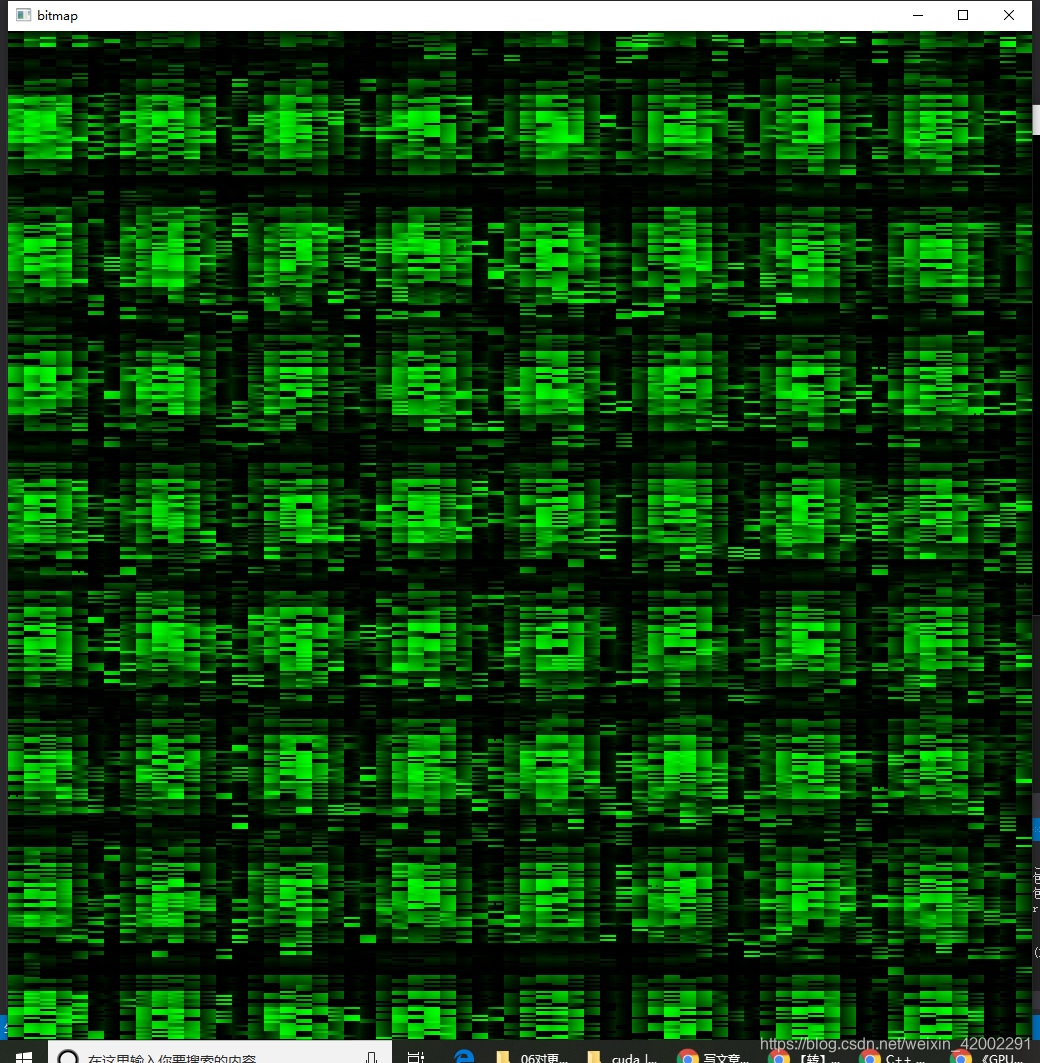
不加__syncthreads()的运行效果:
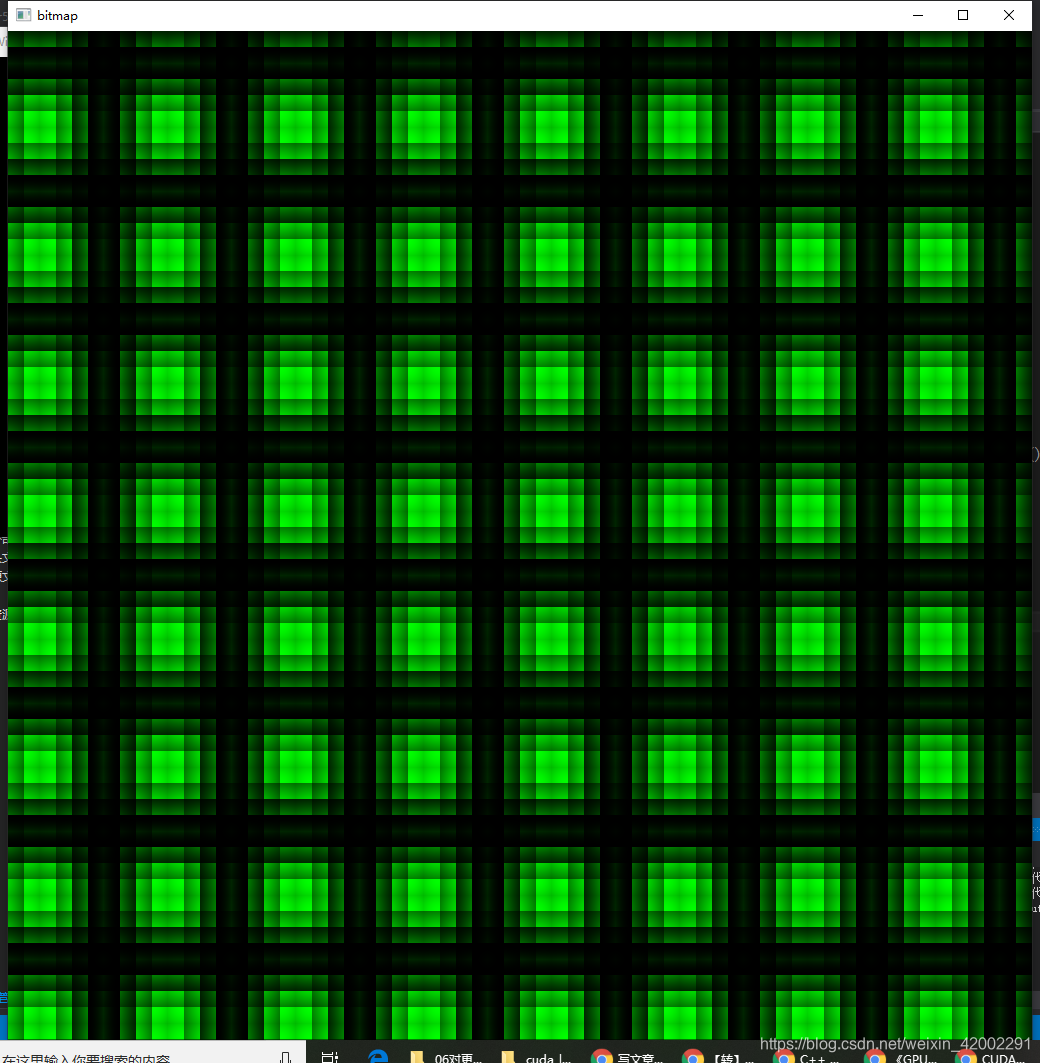
加了__syncthreads()的运行效果:

















 1553
1553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









