 Unity中六轴机械臂的虚实联动控制
Unity中六轴机械臂的虚实联动控制








 本文介绍了如何在Unity中实现物理与虚拟车间的联动,特别是对六轴机械臂的简单控制。作者通过创建空物体并将其作为关节的父级,结合C#脚本来根据接收到的角度数据实现机械臂的旋转。尽管对于新手来说方法可能不最优,但提供了一种实用的参考方案。
本文介绍了如何在Unity中实现物理与虚拟车间的联动,特别是对六轴机械臂的简单控制。作者通过创建空物体并将其作为关节的父级,结合C#脚本来根据接收到的角度数据实现机械臂的旋转。尽管对于新手来说方法可能不最优,但提供了一种实用的参考方案。
Unity实现物理与虚拟车间的联动(一)
时隔几年后更新:看到评论很多想要demo,其实内容上我基本已经比较详细写了怎么实现了,调用的也是基础的方法。这个项目做完也就没管过了,代码也都没有了。最近两年转做基于虚幻引擎的相关软件研制工作了,也会尽量挤时间分享下UE的学习记录。
对六轴机械臂的简单控制
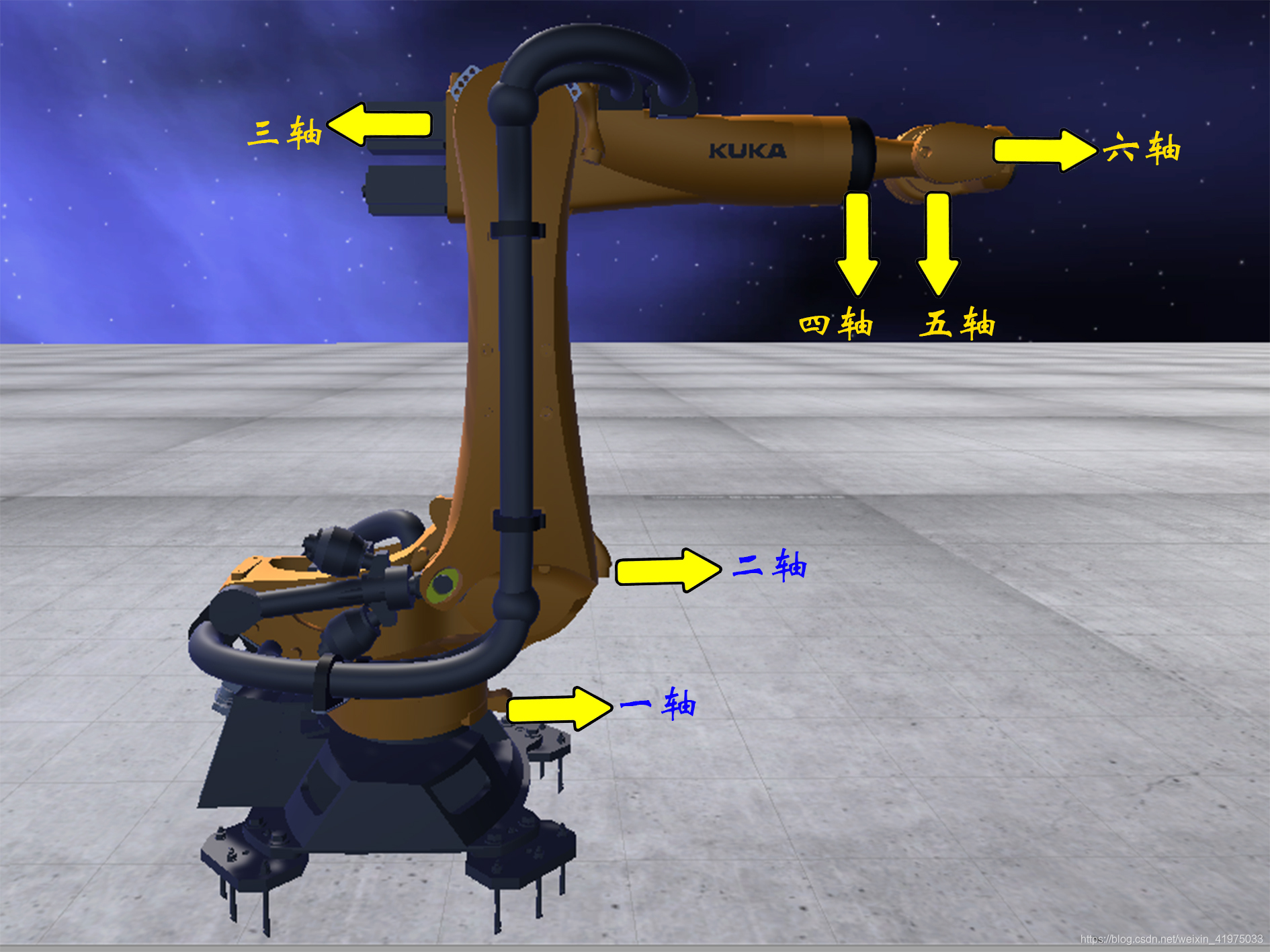
上周开始做一个新项目,需要在Unity里实现一个六轴机械臂的实体与模型的联动。机械臂传输回来的数据包含每一个轴当前旋转的角度,当然,这个角度是机械臂自身按照自己的坐标系计算的。所以在Unity中要想实现转到同样的位置,必然还需要对数据进行角度转换。目前由于机械臂的通信还在调试,所以先在Unity中实现了对机械臂的简易控制。
本人是新手,所以实现方法可能不是最好的。但是分享出来供大家参考。
先贴上机械臂的图:
由于这个模型是别人做的,模型是由一块块小零件组合而成。如图:
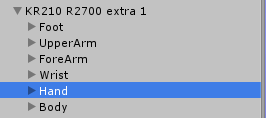
可以看出来零件是非常多的,所以第一步我是按照每一个部分,将零件归类整理,这样方便下一步的操作,如图:
接下来就是要对每一个部分进行控制了。其实对机械臂的控制很简单,每一个关节只有旋转。所以首先想到的是能不能用Physics下面的joint呢?经过尝试以后,发现效果并不好。很难实现要求的按照传过来的角度进行控制。
于是我在网上查了很多资料,看到了这一篇帖子。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









