



 本文介绍如何使用Azure Kinect DK深度相机与open3d框架实现室内环境的三维重建,包括SDK安装、数据采集及处理、三维重建流程等关键步骤。
本文介绍如何使用Azure Kinect DK深度相机与open3d框架实现室内环境的三维重建,包括SDK安装、数据采集及处理、三维重建流程等关键步骤。
Azure Kinect DK 深度相机+NVIDIA jetson实时三维重建系列
前言
利用开源框架open3d的Reconstruction system实现Azure Kinect DK相机的三维重建,已上传代码:
https://github.com/luckyluckydadada/Azure-Kinect-DK-3D-reconstruction.git
环境说明
利用开源框架open3d的Reconstruction system实现Azure Kinect DK相机的三维重建。
开发环境是在Ubuntu18.04笔记本+DK相机上进行,可以携带笔记本连着dk相机(充电宝供电给相机)进行室外采集,采集和重建使用的open3d版本不一样,最好用conda建立两个独立的环境。
另外在win10上可以进行重建,但是利用win10+相机采集数据有些小问题,需要自行解决。
后续会将在jetson+dk相机上进行,最好可以实时。
请确保您完成了Azure Kinect DK 深度相机sdk安装(Ubuntu+ARM64,Ubuntu+AMD64,Windows)和Azure Kinect DK 点云和RGBD图的获取并通过测试,再继续下面的过程。
安装
git clone https://github.com/luckyluckydadada/Azure-Kinect-DK-3D-reconstruction.git
cd Azure-Kinect-DK-3D-reconstruction/open3d_reconstruction
录制和提取数据
cd Azure-Kinect-DK-3D-reconstruction/open3d_reconstruction
pip install -r requirements-0.10.txt # 此处安装 open3d版本为 0.10.0
录制数据,空格开始录制,esc退出录制并保存:
python sensors/azure_kinect_recorder.py --output dataset/name.mkv
提取rgb和depth图像,以及相机config和相机内参config:
python sensors/azure_kinect_mkv_reader.py --input dataset/name.mkv --output dataset/name
进行重建
cd Azure-Kinect-DK-3D-reconstruction/open3d_reconstruction
pip install -r requirements.txt # 此处安装 open3d版本为 0.12.0
如果发生目录移动,请修改dataset/name/config.json 中的"path_dataset" 和 "path_intrinsic"的值。
python run_system.py dataset/name/config.json --make --register --refine --integrate
重建demo
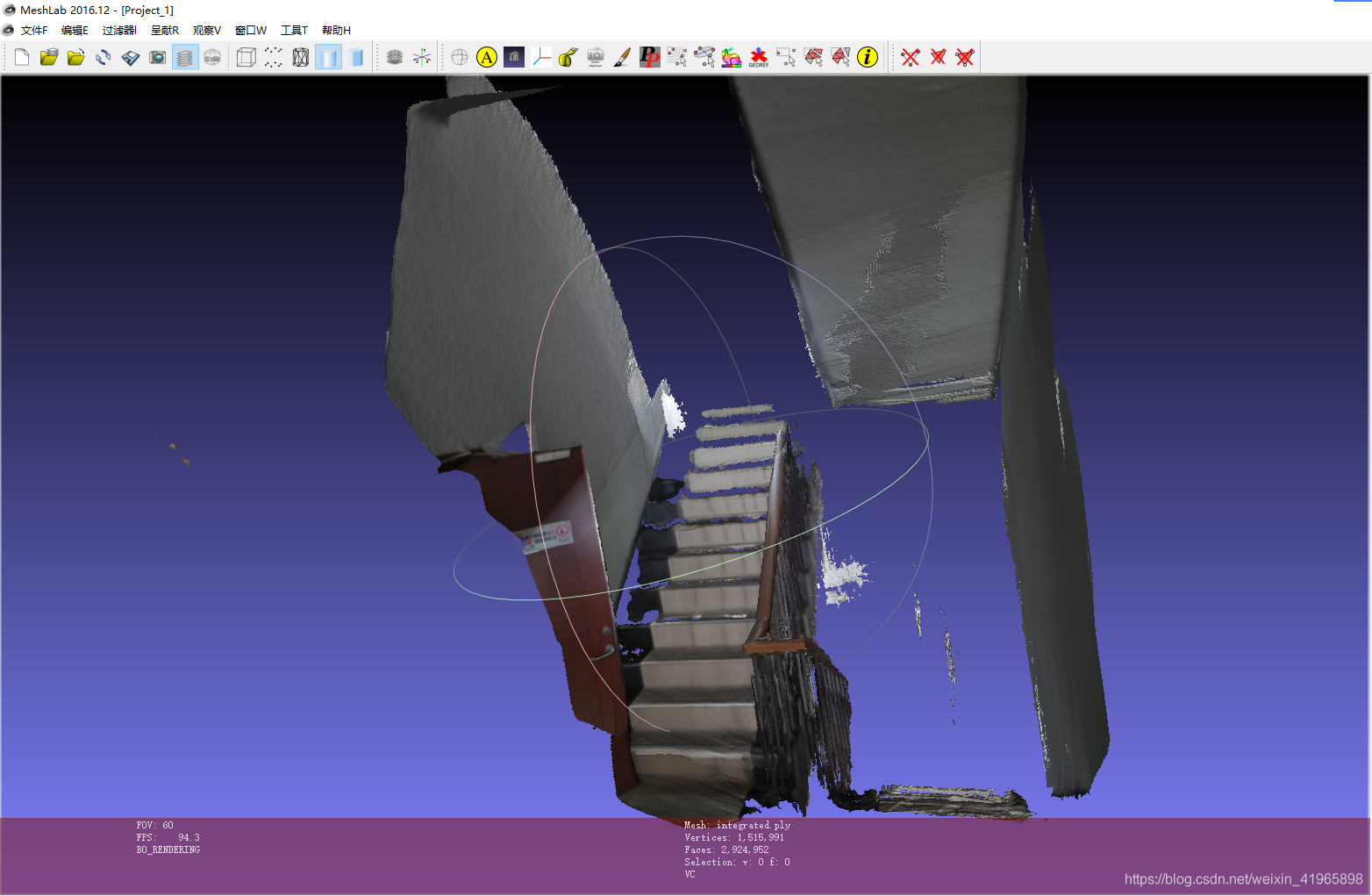
楼梯

彩色点云的结果:
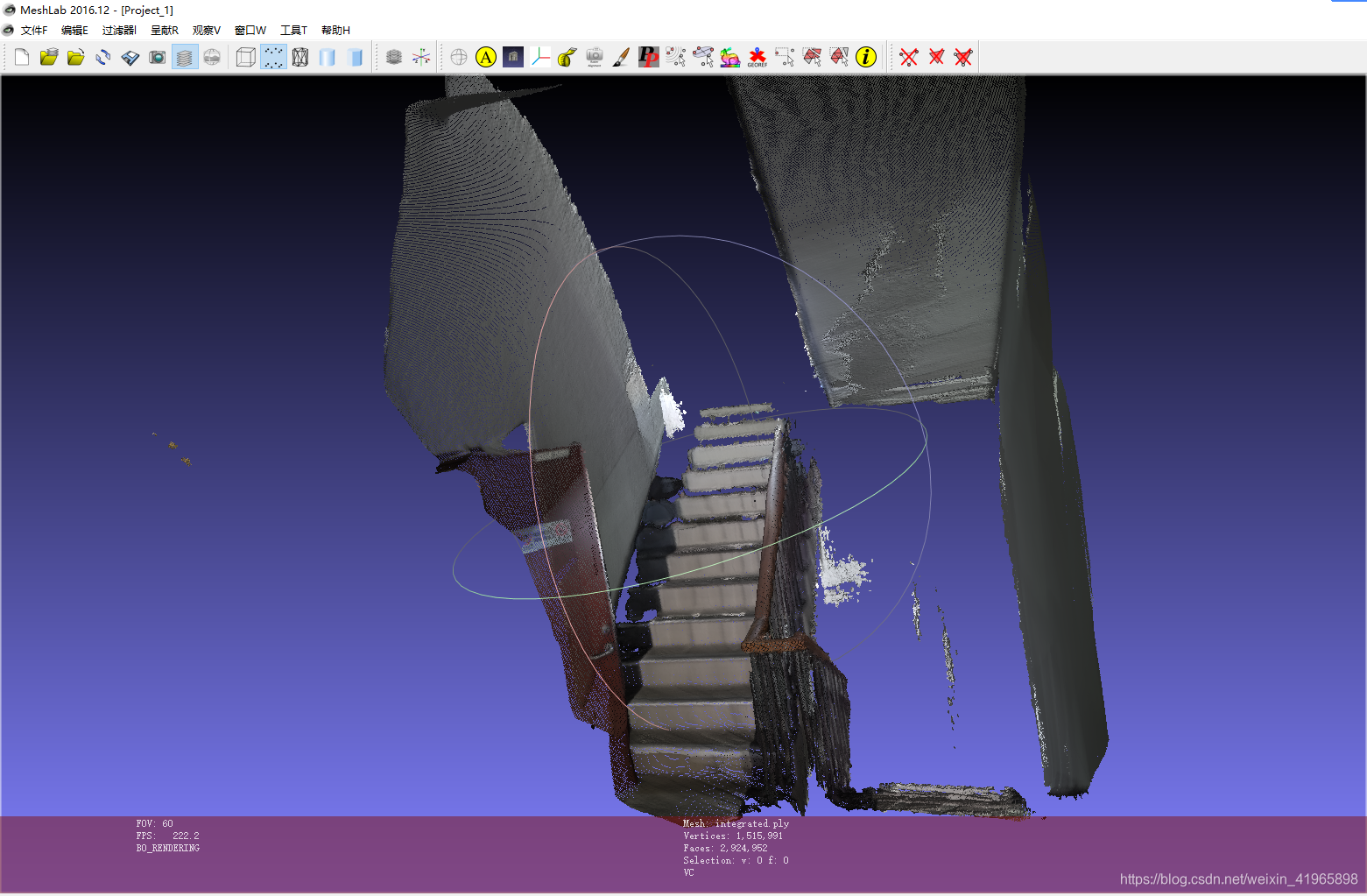
mesh的结果:
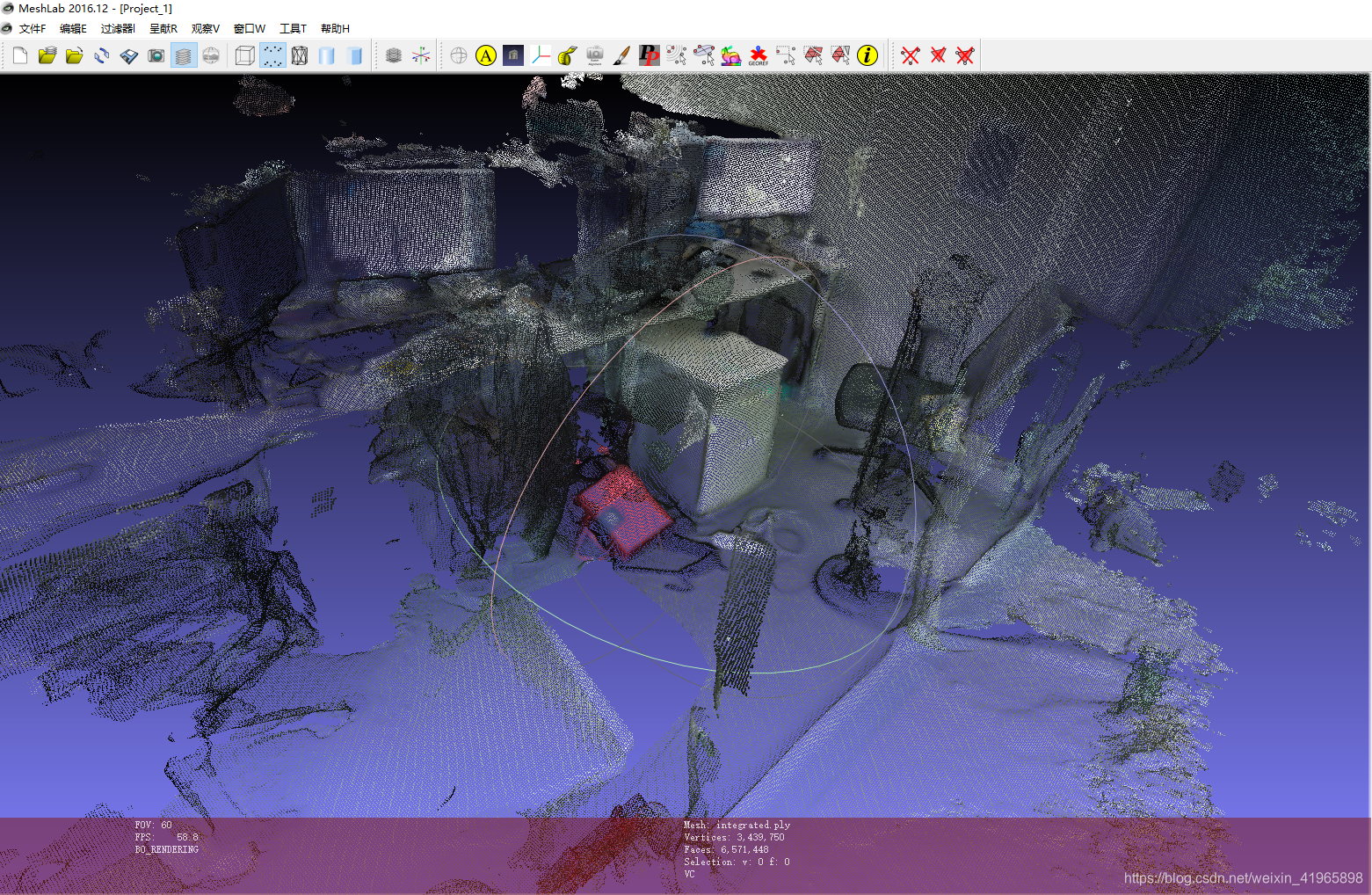
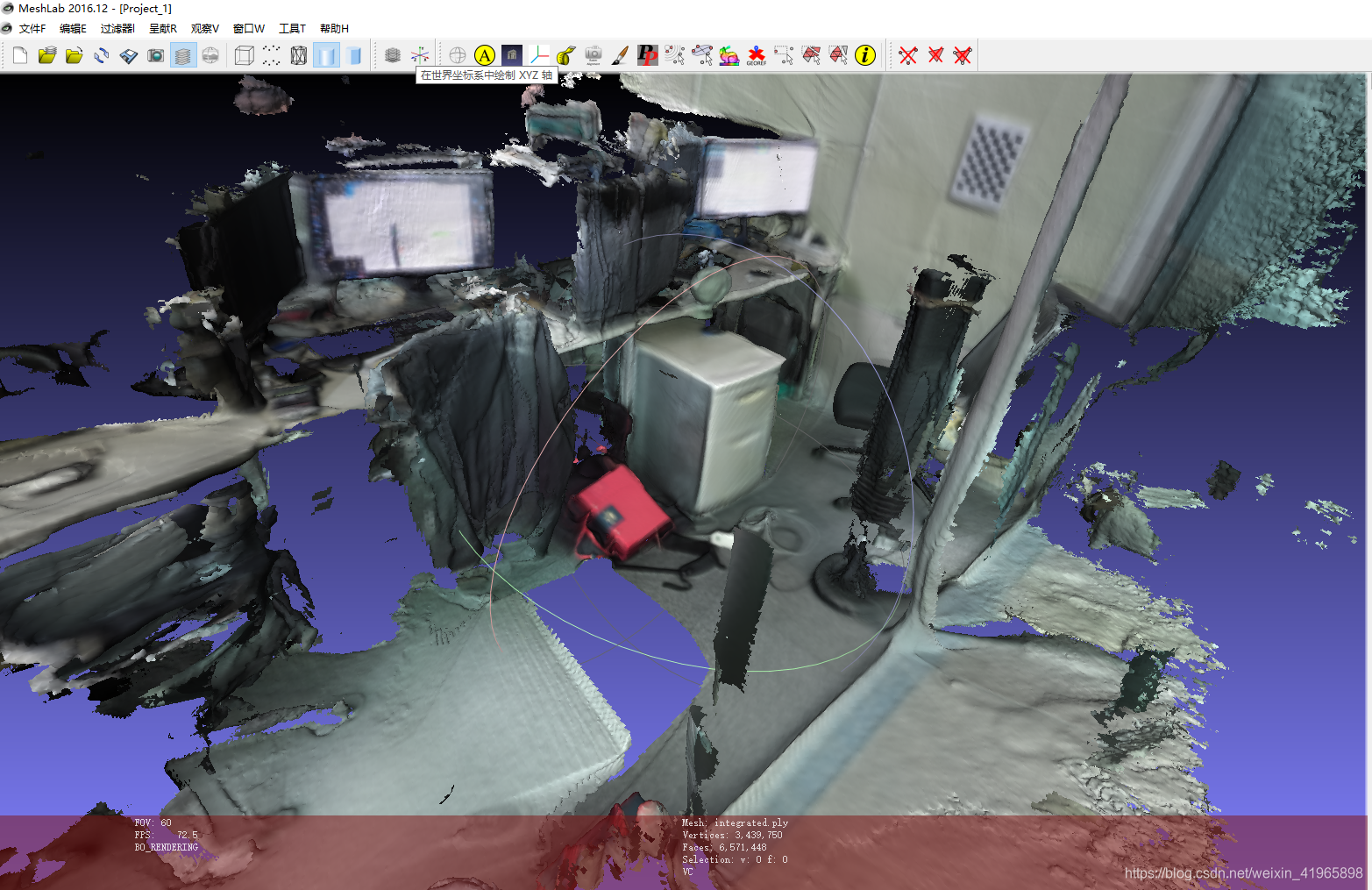
办公室
彩色点云的结果:
mesh的结果:
参考
http://www.open3d.org/docs/latest/tutorial/ReconstructionSystem/index.html

















 612
612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









