







 本文介绍了Triton Pipelines在模型服务中的应用。它是一种工作流,可将不同模型服务组合成完整应用。其实现方式有BLS和Ensemble,前者灵活性高,后者效率高。还阐述了部署方法,以目标检测为例,将nms模块单独部署,通过pipelines连接相关模块,并给出了工作流及处理输出数量不固定的方法。
本文介绍了Triton Pipelines在模型服务中的应用。它是一种工作流,可将不同模型服务组合成完整应用。其实现方式有BLS和Ensemble,前者灵活性高,后者效率高。还阐述了部署方法,以目标检测为例,将nms模块单独部署,通过pipelines连接相关模块,并给出了工作流及处理输出数量不固定的方法。
部署yolov5 Triton Pipelines
1. 为什么使用Triton pipelines
众所周知,模型服务不仅包含 GPU based Inference,还包括preprocess和postprocess。Triton Pipelines是一种workflow, 它可以组合不同的模型服务组合成一个完整的应用, 同一个模型服务还可以被不同的workflow使用。
因此可以单独将preprocess或postprocess单独部署,然后通过Pipeline将它们和infer模块串联起来。这样做的好处是:
-
每个子模块都可以分别申请不同种类和大小的资源、配置不同的参数,以达到最大化模型服务效率的同时,充分利用计算资源。
-
可以避免传输中间张量的开销,减小通过网络传输的数据大小,并最大限度地减少必须发送到 Triton 的请求数量。
2. Triton Pipelines的实现方式
Nvidia Triton提供了两种Pipleline的部署方式:分别为Business Logic Scripting(BLS)和Ensemble。下面简单介绍一下这两种方式。
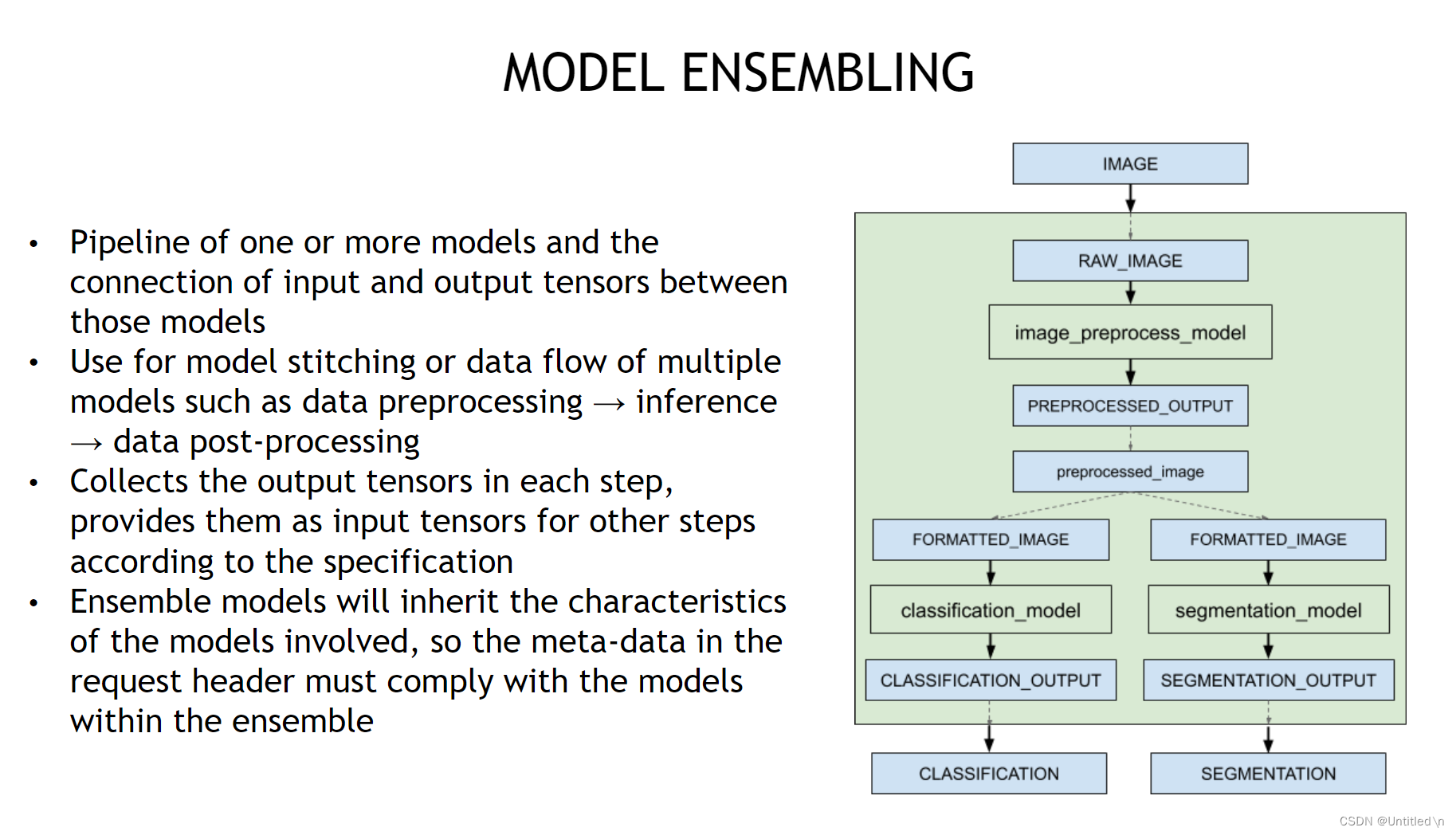
- Ensemble
通过组合model repository里的各类模型成为一个workflow。是一种pipeline调度策略,而不是具体的model。 ensemble效率更高,但无法加入条件逻辑判断,数据只能按照设定的pipeline流动,适合pipeline结构固定的场景
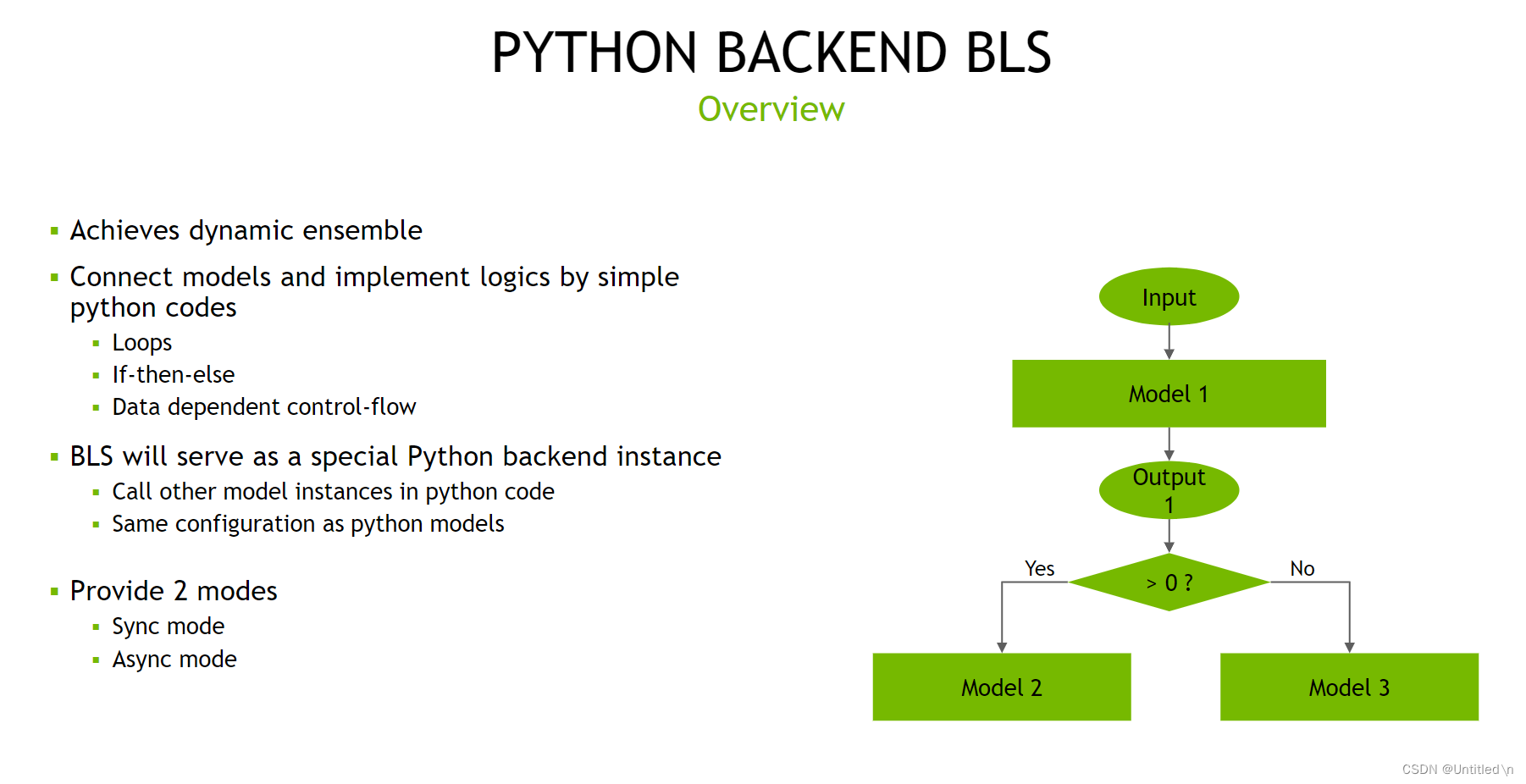
- BLS
一种特殊的python backend,通过python code调用其他model instance。BLS灵活性更高,可以加入一些逻辑和循环来动态组合不同的模型,从而控制数据的流动方向。
3. 如何部署Triton Pipelines
通过Pipelines部署process模块的一个出发点是,减小通过网络传输的数据大小。在目标检测模型服务中,输入端的raw_image和nms之前的candidate bboxes的数据量都是相对较大,因此一个合适的方案就是将nms这一postprecess模块单独通过python backend部署,通过pipelines连接infer和nms模块,client则需要对raw_data进行必要的resize等preprocess操作。
3.1 工作流
Pipleine配置及python backend参考Model Repository的ensemble和bls
两种部署方式的工作流如下:
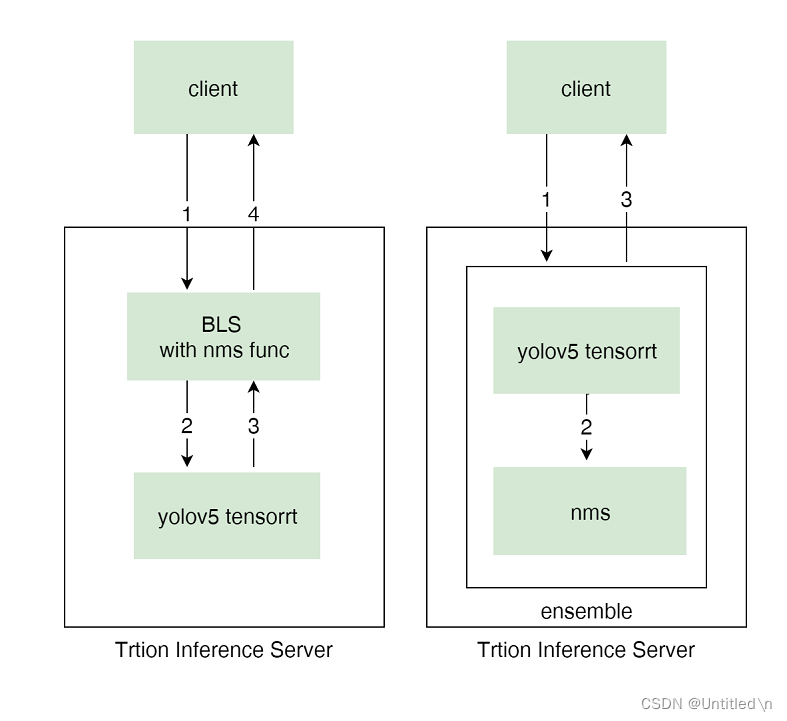
3.2 BLS
- 数据流向
- 通过http/gRPC发送resize后的image到BLS模型服务
- BLS服务通过C API调用yolov5 tensorrt模型服务
- Triton Server将candidate bboxes返回给BLS服务
- BLS服务对candidate bboxes进行nms操作,将最终的bboxes通过http/gRPC返回给client
3.3 Ensemble
- 数据流向
- 通过http/gRPC发送resize后的image到ensemble模型服务
- ensemble模型服务通过memory copy将yolov5 tensorrt的输出的candidate bboxes传递给nms模型服务
- ensemble模型服务将nms输出的bboxes通过http/gRPC返回给client
3.4 Notice
NMS输出的bboxes数量不固定,一般有三种处理方式:
- 对bboxes做padding, 例如规定输出是
[batch_size, padding_count, xywh or xyxy], 其中 pandding_count 根据实际场景来确定 - 将模型的输出结果放到一个 json, 以
json string ([N, 1])的形式返回 - 采用将 response 解耦的方式
本文采用padding的方式来解决该问题
from torch.nn import functional as F
i = torchvision.ops.nms(boxes, scores, nms_threshold)
# padding boxes to 300
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
bbox_pad_nums = max_det - i.shape[0]
output_bboxes[xi] = F.pad(x[i], (0,0,0, bbox_pad_nums), value=0)

















 1503
1503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









