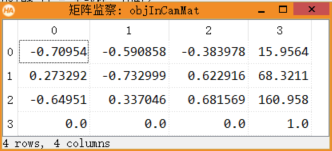
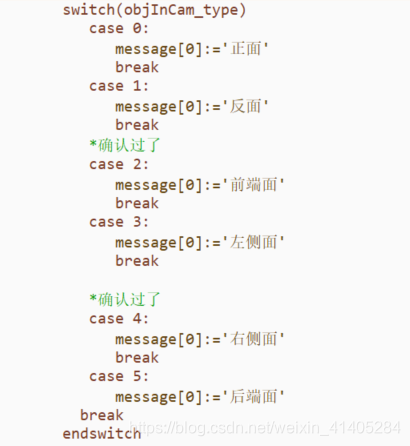
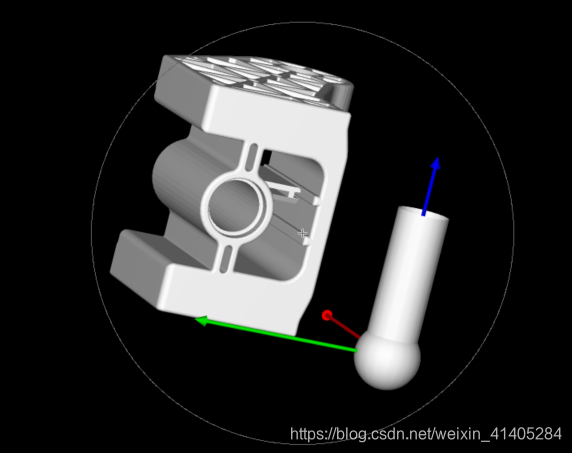
无序抓取(2) 上一讲无序抓取,我们说到将去噪后的点云,按’z’方向从高到低排序。这一篇博文将叙述,判别匹配到的面是六面体的哪个面(正面、侧面、反面…) 一.判别六面体 首先将最高点的平面位姿,转换成矩阵,获得zx,zy,zz,通过判别zz的角度,确定当前平面落在那个象限内。 通过zx,zy判定当前Pose的具体位姿,(正面,反面,侧面) 大家可以学习一下这个switch的写法。 框内的物体杂乱无章,可能会出现机器臂根本无法抓取的物料,所以此时要判别一下,当前识别的最高处,点云是否可以抓取。若可以抓取,则继续寻找抓取点. 二.识别抓取点(六面翻转) 首先获得抓取点的原点位置 图中可以看到,抓取点在(0,0,0,0,0,0,0)原点位置处,可以根据上一个步骤,判别到抓取面之后,对抓取点进行角度和未知的偏移。 通过六面翻转获得六个面的机器臂抓取点的姿态。








 该博客讲述了如何使用Halcon进行双目结构光定位,重点在于如何判别识别到的六面体面并确定机器臂的抓取点。首先,通过对点云最高点的处理,判断平面所在象限,从而确定是正面、反面还是侧面。接着,介绍了如何在确认可抓取后,寻找和计算出适合抓取的点,并通过六面翻转得到不同面的抓取点姿态。
该博客讲述了如何使用Halcon进行双目结构光定位,重点在于如何判别识别到的六面体面并确定机器臂的抓取点。首先,通过对点云最高点的处理,判断平面所在象限,从而确定是正面、反面还是侧面。接着,介绍了如何在确认可抓取后,寻找和计算出适合抓取的点,并通过六面翻转得到不同面的抓取点姿态。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






