



IQL算法简介
在在线强化学习(OnlineRL)中,Q函数的更新如下:
Q(s,a)←Q(s,a)+α(r+γmaxa′(s′,a′)−Q(s,a))
Q(s,a)\leftarrow Q(s,a)+\alpha(r+\gamma \max_{a'}(s',a')-Q(s,a))
Q(s,a)←Q(s,a)+α(r+γa′max(s′,a′)−Q(s,a))使用函数近似(如神经网络)来拟合Q函数,并通过最小化时序差分误差来更新:
LQ(θ)=E(s,a,r,s′)∼D[(r+γmaxa′Qθ(s′,a′)−Qθ(s,a))2]
L_Q(\theta) = \mathbb{E}_{(s,a,r,s') \sim D} \left[ \left( r + \gamma \max_{a'} Q_{\theta}(s', a') - Q_{\theta}(s, a) \right)^2 \right]
LQ(θ)=E(s,a,r,s′)∼D[(r+γa′maxQθ(s′,a′)−Qθ(s,a))2]而在离线强化学习(OfflineRL)的设定中,maxa′Qθ(s′,a′)\max_{a'} Q_{\theta}(s', a')maxa′Qθ(s′,a′) 要求我们对下一个状态 s′s's′ 的所有可能动作 a′a'a′ 求最大值。然而,我们的数据集只包含行为策略 πβ\pi_{\beta}πβ 所采取的动作,因此对于某些 s′s's′ ,我们可能没有见过最优动作。由于函数近似器的泛化性,它可能会对未见过的动作给出过高估计,从而导致策略学习到次优甚至危险的动作。
IQL的核心思想是:我们只利用数据集中出现的动作来学习价值函数,避免查询那些未出现动作的Q值。具体来说,IQL通过以下三个步骤实现:
-
IQL引入一个状态价值函数 V(s)V(s)V(s),并定义它应该近似于在状态 sss 下,数据集中高 QQQ 值的动作所对应的 QQQ 值的期望。为此,IQL使用期望回归(expectile regression)来训练 V(s)V(s)V(s)。
LV(ψ)=E(s,a)∼D[L2τ(Qθ(s,a)−Vψ(s))]L_V(\psi) = \mathbb{E}_{(s,a) \sim D} \left[ L_2^{\tau} \left( Q_{\theta}(s, a) - V_{\psi}(s) \right) \right]LV(ψ)=E(s,a)∼D[L2τ(Qθ(s,a)−Vψ(s))]L2τ(u)=∣τ−1(u<0)∣⋅u2L_2^\tau(u) = |\tau - \mathbb{1}(u<0)| \cdot u^2L2τ(u)=∣τ−1(u<0)∣⋅u2这里,τ∈(0,1)\tau \in (0,1)τ∈(0,1) 是一个超参数。当 τ=0.5\tau = 0.5τ=0.5 时,就是标准的均方误差;当 τ>0.5\tau > 0.5τ>0.5 时,损失函数会更多地惩罚 V(s)V(s)V(s) 低于 Q(s,a)Q(s,a)Q(s,a) 的情况,从而鼓励 V(s)V(s)V(s) 逼近 Q(s,a)Q(s,a)Q(s,a) 的上分位数(即较大的Q值)。通过这种方式,V(s)V(s)V(s) 学习到的是在状态 sss 下,数据集中那些高Q值动作对应的Q值的条件期望。注意,这个更新只依赖于数据集中存在的 (s,a)(s,a)(s,a) 对,不涉及任何最大化操作。 -
用 V(s′)V(s')V(s′) 来代替 maxa′Q(s′,a′)\max_{a'} Q(s',a')maxa′Q(s′,a′):
LQ(θ)=E(s,a,r,s′)∼D[(r+γVψ(s′)−Qθ(s,a))2]L_Q(\theta) = \mathbb{E}_{(s,a,r,s') \sim D} \left[ \left( r + \gamma V_{\psi}(s') - Q_{\theta}(s,a) \right)^2 \right]LQ(θ)=E(s,a,r,s′)∼D[(r+γVψ(s′)−Qθ(s,a))2]这里,目标值 r+γVψ(s′)r + \gamma V_{\psi}(s')r+γVψ(s′) 不依赖于动作 a′a'a′,因此不会出现对未见动作的查询。同时,由于 V(s′)V(s')V(s′) 已经代表了数据集中高Q值动作的期望,所以可以传播高回报的信息。 -
策略 π\piπ 通过一个类似于优势加权行为克隆(Advantage-Weighted Regression, AWR)的方式来学习:
Lπ(ϕ)=E(s,a)∼D[exp(β(Qθ(s,a)−Vψ(s)))⋅logπϕ(a∣s)]L_{\pi}(\phi) = \mathbb{E}_{(s,a) \sim D} \left[ \exp\left(\beta \left(Q_{\theta}(s,a) - V_{\psi}(s)\right)\right) \cdot \log \pi_{\phi}(a|s) \right]Lπ(ϕ)=E(s,a)∼D[exp(β(Qθ(s,a)−Vψ(s)))⋅logπϕ(a∣s)]其中,β>0\beta > 0β>0 是一个超参数。注意,优势函数 A(s,a)=Q(s,a)−V(s)A(s,a) = Q(s,a) - V(s)A(s,a)=Q(s,a)−V(s) 衡量了动作 aaa 相对于状态 sss 下平均好动作水平的优势。因此,权重 exp(β⋅A(s,a))\exp(\beta \cdot A(s,a))exp(β⋅A(s,a)) 会对那些优势高的动作赋予更大的权重,从而使得策略更倾向于选择数据集中优势高的动作。
与CQL相比
| 特性 | IQL | CQL | 优胜方 |
|---|---|---|---|
| 核心理念 | 回避 OOD 查询 | 惩罚 OOD 高估 | 视场景而定 |
| 策略约束 | 隐式(自然) | 显式(正则化) | IQL 更优雅 |
| 理论保证 | 较弱但实用 | 强理论下界 | CQL 更严谨 |
| 实现简单性 | 简单直观 | 中等复杂度 | IQL 更易实现 |
| 连续动作 | 优秀 | 良好 | IQL 更适合 |
| 离散动作 | 良好 | 优秀 | CQL 更直接 |
| 数据效率 | 高(利用好数据) | 保守(避免坏数据) | 互补 |
| 超参数敏感 | 中等(τ) | 高(α) | IQL 更稳定 |
| 计算效率 | 中等 | 较高 | IQL 更高效 |
| SOTA 性能 | 多任务领先 | 部分任务领先 | 总体 IQL 稍优 |
代码
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import numpy as np
import random
import d4rl
import math
import gym
from torch.distributions import Normal
from matplotlib.ticker import MaxNLocator
import matplotlib.pyplot as plt
class QNet(nn.Module):
def __init__(self, obs_dims, act_dims):
super().__init__()
self.mlp = nn.Sequential(
nn.Linear(obs_dims + act_dims, 512),
nn.LeakyReLU(),
nn.LayerNorm(512),
nn.Linear(512, 256),
nn.LeakyReLU(),
nn.LayerNorm(256),
nn.Linear(256, 128),
nn.LeakyReLU(),
nn.LayerNorm(128),
nn.Linear(128, 64),
nn.LeakyReLU(),
nn.LayerNorm(64),
nn.Linear(64, 1)
)
def forward(self, obs, act):
x = torch.cat([obs, act], dim=-1)
return self.mlp(x)
class VNet(nn.Module):
def __init__(self, obs_dims):
super().__init__()
self.mlp = nn.Sequential(
nn.Linear(obs_dims, 512),
nn.LeakyReLU(),
nn.LayerNorm(512),
nn.Linear(512, 256),
nn.LeakyReLU(),
nn.LayerNorm(256),
nn.Linear(256, 128),
nn.LeakyReLU(),
nn.LayerNorm(128),
nn.Linear(128, 64),
nn.LeakyReLU(),
nn.LayerNorm(64),
nn.Linear(64, 1)
)
def forward(self, obs):
return self.mlp(obs)
class GasPolicy(nn.Module):
def __init__(self, obs_dims, act_dims,
log_std_min=-5, log_std_max=2):
super().__init__()
self.log_std_min = log_std_min
self.log_std_max = log_std_max
self.mlp = nn.Sequential(
nn.Linear(obs_dims, 512),
nn.LeakyReLU(),
nn.LayerNorm(512),
nn.Linear(512, 256),
nn.LeakyReLU(),
nn.LayerNorm(256),
nn.Linear(256, 128),
nn.LeakyReLU(),
nn.LayerNorm(128),
nn.Linear(128, 64),
nn.LeakyReLU(),
nn.LayerNorm(64),
nn.Linear(64, 2 * act_dims),
)
def forward(self, obs):
atanh_mu, log_std = self.mlp(obs).chunk(2, dim=-1)
log_std = torch.clamp(log_std, self.log_std_min, self.log_std_max)
return atanh_mu.tanh(), log_std.exp()
class IQLAgent:
def __init__(self, env, device="cpu", gamma=0.99, expectile=0.7, temperature=3.0, lr=3e-4):
self.obs_dims = env.observation_space.shape[0]
self.act_dims = env.action_space.shape[0]
self.device = device
self.gamma = gamma
self.expectile = expectile
self.temperature = temperature
self.actor = GasPolicy(self.obs_dims, self.act_dims).to(device)
self.q1_net = QNet(self.obs_dims, self.act_dims).to(device)
self.q2_net = QNet(self.obs_dims, self.act_dims).to(device)
self.value_net = VNet(self.obs_dims).to(device)
self.actor_optimizer = optim.AdamW(self.actor.parameters(), lr=lr)
self.q1_optimizer = optim.AdamW(self.q1_net.parameters(), lr=lr)
self.q2_optimizer = optim.AdamW(self.q2_net.parameters(), lr=lr)
self.value_optimizer = optim.AdamW(self.value_net.parameters(), lr=lr)
@staticmethod
def expectile_loss(diff, expectile):
weight = torch.where(diff > 0, expectile, 1 - expectile)
return weight * diff.pow(2)
def select_action(self, obs, greedy=False):
with torch.no_grad():
obs = torch.tensor(obs, dtype=torch.float, device=self.device)
if greedy:
mu, _ = self.actor(obs)
return mu.cpu().numpy()
else:
mu, std = self.actor(obs)
normal_dist = Normal(mu, std)
a = normal_dist.sample()
return a.cpu().numpy().clip(-1, 1)
def train(self, dataset, batch_size=256):
observations, actions, rewards, next_observations, dones = (
torch.tensor(dataset.get("observations"), dtype=torch.float, device=self.device),
torch.tensor(dataset.get("actions"), dtype=torch.float, device=self.device),
torch.tensor(dataset.get("rewards"), dtype=torch.float, device=self.device).reshape(-1, 1),
torch.tensor(dataset.get("next_observations"), dtype=torch.float, device=self.device),
torch.tensor(dataset.get("terminals"), dtype=torch.float, device=self.device).reshape(-1, 1),
)
perm = torch.randperm(len(observations))
observations, actions, rewards, next_observations, dones = (
observations[perm], actions[perm], rewards[perm],
next_observations[perm], dones[perm]
)
data_size = observations.shape[0]
if data_size % batch_size == 0:
mini_epochs = data_size // batch_size
else:
mini_epochs = (data_size // batch_size) + 1
v_loss_list, q_loss_list, actor_loss_list = [], [], []
for m_ep in range(mini_epochs):
start = m_ep * batch_size
end = min(data_size, (m_ep + 1) * batch_size)
obs, act, r, next_obs, d = (
observations[start:end], actions[start:end], rewards[start:end],
next_observations[start:end], dones[start:end]
)
# ---------------------- Value Update ---------------------- #
with torch.no_grad():
q1 = self.q1_net(obs, act)
q2 = self.q2_net(obs, act)
q = torch.min(q1, q2)
v = self.value_net(obs)
v_loss = self.expectile_loss(q - v, self.expectile).mean()
self.value_optimizer.zero_grad()
v_loss.backward()
self.value_optimizer.step()
v_loss_list.append(v_loss.item())
# ---------------------- Q Net Update ---------------------- #
with torch.no_grad():
v_next = self.value_net(next_obs)
q_target = r + self.gamma * (1.0 - d) * v_next
q1_pred = self.q1_net(obs, act)
q2_pred = self.q2_net(obs, act)
q1_loss = F.mse_loss(q1_pred, q_target)
q2_loss = F.mse_loss(q2_pred, q_target)
q_loss = q1_loss + q2_loss
self.q1_optimizer.zero_grad()
self.q2_optimizer.zero_grad()
q_loss.backward()
self.q1_optimizer.step()
self.q2_optimizer.step()
q_loss_list.append(q_loss.item())
# ---------------- Actor Update (AWR-style) ---------------- #
with torch.no_grad():
adv = q - v
weights = torch.exp(adv * self.temperature).clamp(max=100.0)
mu, std = self.actor(obs)
normal_dist = Normal(mu, std)
log_prob = normal_dist.log_prob(act).sum(dim=-1, keepdim=True)
actor_loss = -(weights * log_prob).mean()
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
actor_loss_list.append(actor_loss.item())
return (
sum(v_loss_list) / len(v_loss_list),
sum(q_loss_list) / len(q_loss_list),
sum(actor_loss_list) / len(actor_loss_list)
)
def evaluate(agent, env, episodes=10, greedy=True):
avg_reward = 0.0
for _ in range(episodes):
state = env.reset()
done = False
while not done:
action = agent.select_action(state, greedy)
state, reward, done, _ = env.step(action)
avg_reward += reward
avg_reward /= episodes
return avg_reward
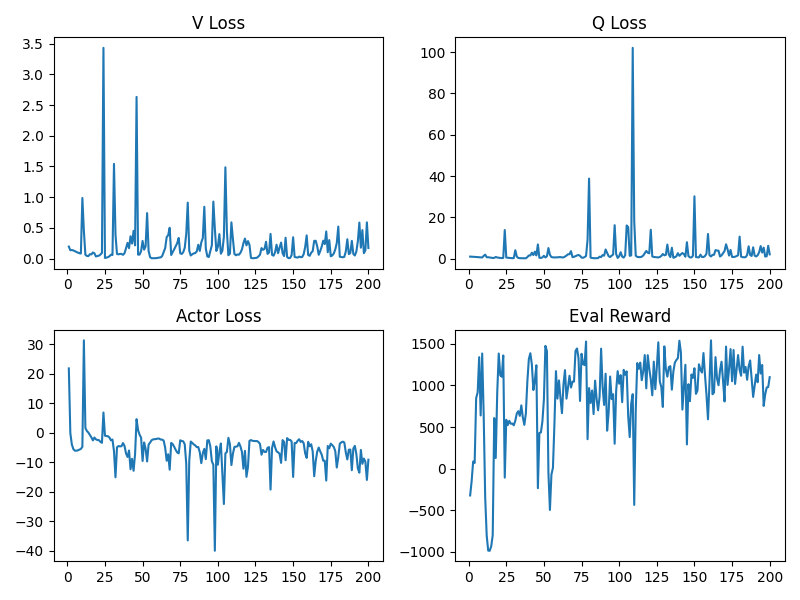
def plot_training_curve(loss_dict, reward_list):
all_items = list(loss_dict.items()) + [("Eval Reward", reward_list)]
n_subplots = len(all_items)
ncols = math.ceil(math.sqrt(n_subplots))
nrows = math.ceil(n_subplots / ncols)
fig, axes = plt.subplots(nrows, ncols, figsize=(4*ncols, 3*nrows))
axes = axes.flatten()
epochs = range(1, len(reward_list)+1)
for i, (name, data) in enumerate(all_items):
axes[i].plot(epochs, data, label=name)
axes[i].set_title(name)
axes[i].xaxis.set_major_locator(MaxNLocator(integer=True))
for j in range(i+1, len(axes)):
axes[j].axis('off')
plt.tight_layout()
plt.show()
def set_seed(seed):
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
def main(episodes=100, batch_size=256, device="cpu", seed=2025):
set_seed(seed)
env = gym.make("bullet-halfcheetah-medium-expert")
env.seed(seed)
dataset = env.get_dataset()
agent = IQLAgent(env, device=device)
loss_dict = {"V Loss": [], "Q Loss": [], "Actor Loss": []}
reward_list = []
for ep in range(1, episodes+1):
v_loss, q_loss, actor_loss = agent.train(dataset, batch_size)
avg_reward = evaluate(agent, env)
loss_dict["V Loss"].append(v_loss)
loss_dict["Q Loss"].append(q_loss)
loss_dict["Actor Loss"].append(actor_loss)
reward_list.append(avg_reward)
print(
f"""[Epoch {ep:03d}]
|* V Loss: {v_loss:.4f}
|* Q Loss: {q_loss:.4f}
|* Actor Loss: {actor_loss:.4f}
|* Eval Reward: {avg_reward:.2f}
"""
)
plot_training_curve(loss_dict, reward_list)
if __name__ == "__main__":
main(episodes=200, batch_size=8 * 2048, device="mps")

















 7803
7803

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









