







 本文介绍了如何使用Arduino控制器与GP2D12红外测距传感器结合LCD1602液晶屏进行距离测量。实验中,传感器的测量范围为10-80cm,通过Arduino转换并显示在LCD1602上。内容包括传感器的技术规格、三角法测距原理、非线性输出特性以及使用注意事项和优化方法。
本文介绍了如何使用Arduino控制器与GP2D12红外测距传感器结合LCD1602液晶屏进行距离测量。实验中,传感器的测量范围为10-80cm,通过Arduino转换并显示在LCD1602上。内容包括传感器的技术规格、三角法测距原理、非线性输出特性以及使用注意事项和优化方法。
一:
GP2Y0A21YKIR Sensor是日本夏普公司推出的一款性价比高、最常用的红外测距传感器、其与GP2D12测量射程相同,但探测面积略有增加,可用来对物体的距离进行测量,实现轮式机器人的避障功能。它不但体积小、功耗低、价格便宜,而且测距效果好,适合广大机器人发烧友使用。赶快给你的机器人配备一双犀利的眼睛吧!
技术规格:
1.测量射程范围:10 - 80 cm
2.最大允许角度:>40°
3.电源电压:4.5 - 5.5V
4.平均功耗:33 - 40mA
5.峰值功耗:约200mA
6.更新频率/周期:25Hz/40ms
7.模拟输出噪声:<200mV
8.精度和采集的AD位数以及转化计算公式相关,10AD一般能达到0.1CM.
9.测量距离与输出模拟电压关系:2.4V~0.4V模拟信号对应10cm~80cm,输出与距离成反比非线性关系。
尺寸:29.5×13×13.5 mm
实验任务是:把GP2D12红外线测距传感器采集的数据,通过Arduino控制器的算式转换为实际距离值,再显示在集成了I2C接口的LCD1602液晶面板上。

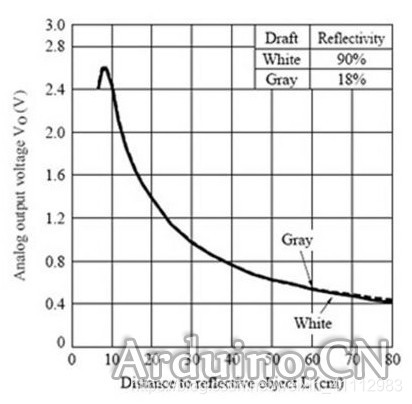
上图就是GP2D12红外线测距传感器的电压值与距离值的关系曲线,从这个曲线可以看出,电压输出与距离成反比,而且是非线性关系。根据上图关系曲线,大约关系为10cm距离时有2.55V输出,80cm距离时有0.42V输出。可以通过该曲线拟合出电压值与距离值的数学关系式,但是这个关系式里的距离是参考距离值,实际距离值=(参考距离值-0.42)cm,另外由于Arduino的模拟量采样命令analogRead(),采样的数据范围是0至1023,对应的电压范围是0至5V,每格数据代表0.0049V,于是读取的有效数据应该由86(0.42V)至520(2.548V)。所以最终可以推导出实际距离与采样数据之间的关系式为:
实际距离=2547.8/((float)采样数据*0.49-10.41)-0.42
这个实际距离与采样数据之间的关系式,您会在下面程序中再次看到,我用红色字体标注出来了。
实验中,我们用到的I2C接口的LCD1602也是比较方便的。
二:1602:
用四根杜邦线,把1602LCD后面的I2C接口四个引脚与Xbee传感器扩展板V5的I2C专用端口连接起来,就可以实现Arduino控制器与LCD
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3573
3573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









