







【写在前面】
网上资料梳理,侵删烦请联系。或有表达错误,欢迎指出纠正。
【参考引用】
https://blog.youkuaiyun.com/fulinwsuafcie/article/details/9771943
0秒延时拍摄
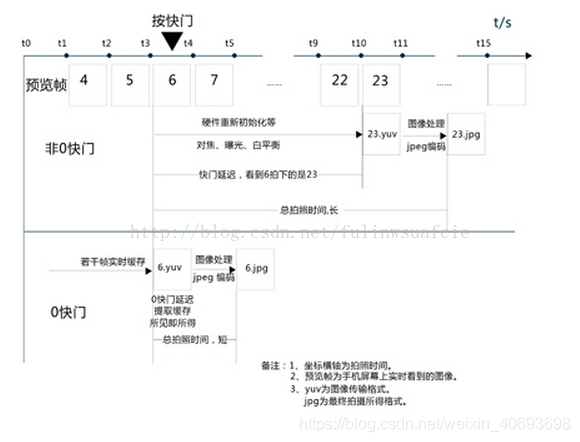
普通拍照
按下快门后需要进行一系列处理和校正再进行编码。如对焦、曝光、白平衡等。
譬如在预览30fps下,按下快门时在第1帧,实际拍得的照片是第8帧的图像。
ZSL-0秒延时拍照
所拍即所得。按下快门那一刻拍到的照片就是当时所看到的照片。ZSL模式拍照会缓存若干帧,在按下快门那一刻,直接提取缓存帧进行编码保存照片。
譬如在预览30fps的情况下,按下快门时是在第1帧,则实际上拍得的照片是第1帧的图像。

















 1305
1305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









