







ROS-1 杂谈_03
1.首先在终端运行roscore
roscore
2.新建一个文件夹,将想要读取的bag放入
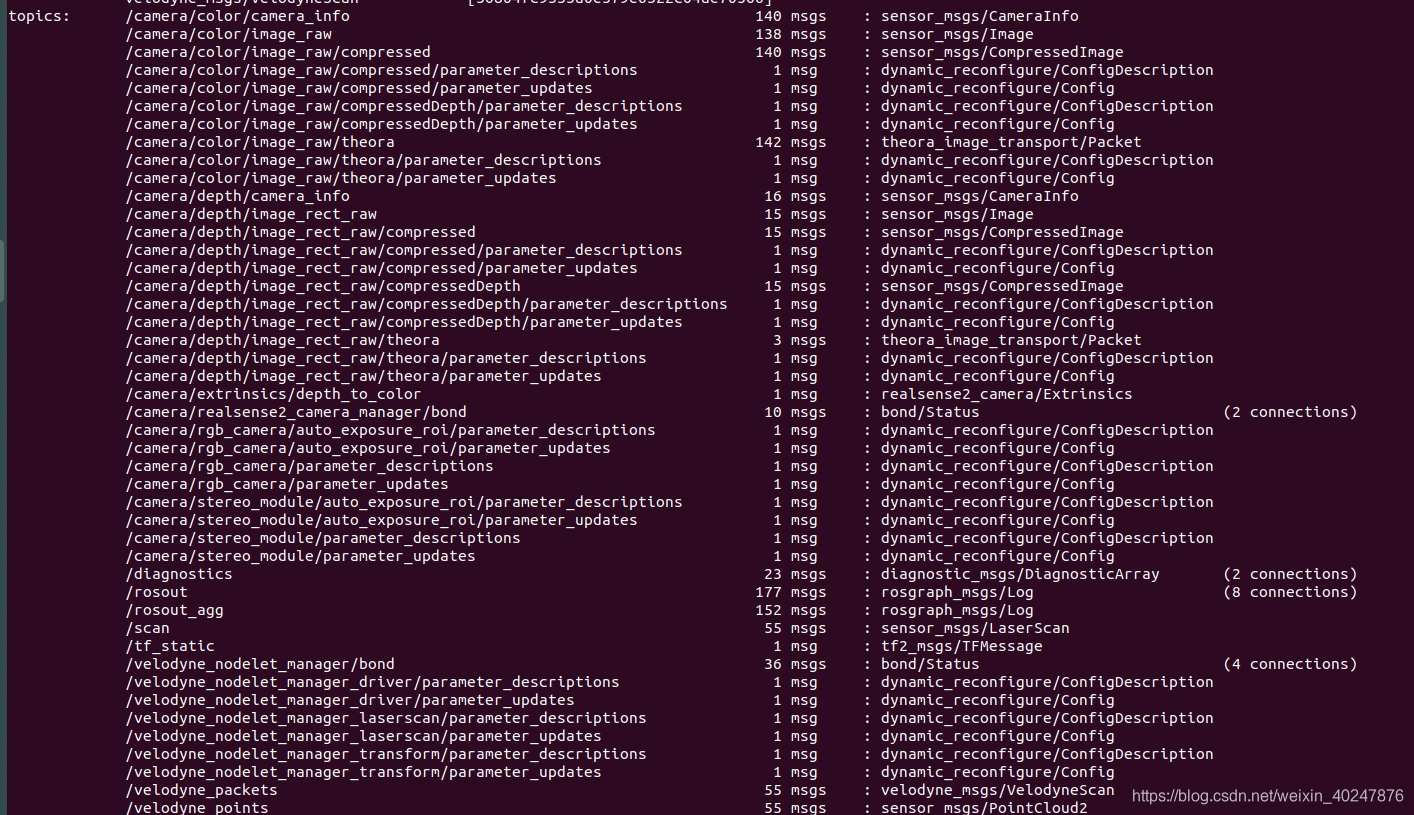
3.在bag所在的目录下,打开一个终端,运行rosbag info bag名.bag(用于找到自己的点云的topic,结果如下图的最后一行:/velodyne_points)
rosbag info bag名.bag
4.在bag所在的目录下,打开终端并输入以下指令,从而读取点云并将其保存成pcd文件
rosrun pcl_ros bag_to_pcd bag名.bag /velodyne_points (或者换成自己的点云topic) pcd (保存的位置)
# bag名改为自己的包的名字, 点云topic改为自己的点云topic, pcd是指在当前文件夹下新建了一个pcd文件夹,用于存放pcd文件
5.解析完成,解析得到的pcd文件保存在了与rosbag相同目录下的pcd文件夹中

















 488
488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









