




旋转矩阵、欧拉角
注:下面为学习空间机器人技术系列课程笔记,加上一些自己的整理,方便复习。
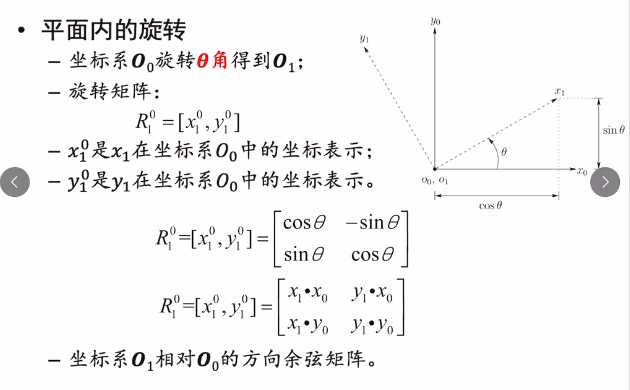
一、旋转矩阵的引出
下面坐标系0的基向量为 ( x 0 , y 0 ) (x_{0},y_{0}) (x0,y0),坐标系1的基向量为 ( x 1 , y 1 ) (x_{1},y_{1}) (x1,y1)。
拓展到三维空间
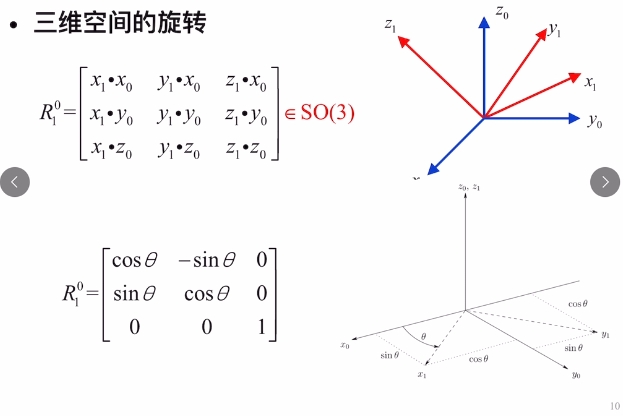
以此类推,绕不同的轴的旋转矩阵如下:

二、坐标变换
在坐标系1下,向量p表示为:
p = u x 1 + v y 1 + w z 1 p=ux_{1}+vy_{1}+wz_{1} p=ux1+vy1+wz1
将其转换到坐标系0下,为p在坐标系0的基向量 ( x 0 , y 0 , z 0 ) (x_{0},y_{0},z_{0}) (x0,y0,z0)下的表示: p 0 p^{0} p
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7547
7547




 到【灌水乐园】发言
到【灌水乐园】发言







