







 本文详细介绍了SIMPLE ONLINE AND REALTIME TRACKING(SORT)算法,它在ICIP 2016上发表,主要利用卡尔曼滤波和匈牙利算法进行多目标跟踪。通过简化信息,如位置、速度和尺度,SORT实现了高效且准确的跟踪。检测阶段使用faster RCNN的结果,匹配和数据关联借助匈牙利算法。当检测与跟踪目标匹配度低于阈值时,会新建或删除跟踪ID。实验结果显示,该算法在MOTA、MOTP等评测指标上有良好表现。
本文详细介绍了SIMPLE ONLINE AND REALTIME TRACKING(SORT)算法,它在ICIP 2016上发表,主要利用卡尔曼滤波和匈牙利算法进行多目标跟踪。通过简化信息,如位置、速度和尺度,SORT实现了高效且准确的跟踪。检测阶段使用faster RCNN的结果,匹配和数据关联借助匈牙利算法。当检测与跟踪目标匹配度低于阈值时,会新建或删除跟踪ID。实验结果显示,该算法在MOTA、MOTP等评测指标上有良好表现。
论文笔记:SORT
1. 简介
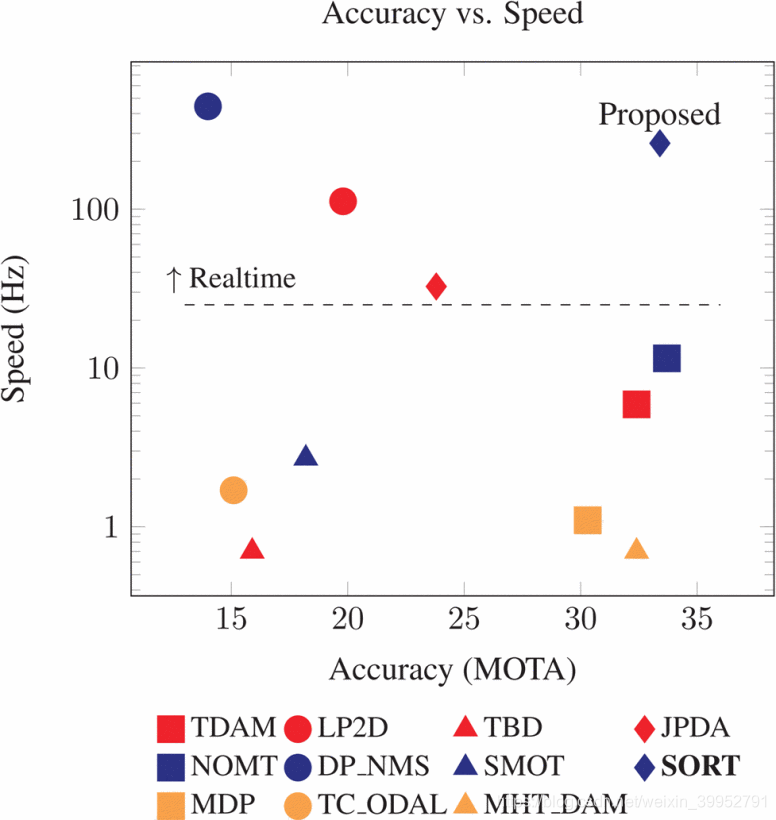
这是发表在ICIP 2016上的一篇文章。文章提出了一个基于卡尔曼滤波和匈牙利算法的多目标跟踪算法,实现了高速跟踪。
2. 动机
之前的算法建立的模型够过于复杂,因此算法的速度很慢或者精度不高。本算法只采用一些简单的信息(位置、速度、尺度,跟踪过程不使用外形特征),从而实现高速且较快的多目标跟踪。
3. 方法
检测
使用faster rcnn的检测结果,只取其中行人部分(且输出概率大于80%)。
建模
每个目标的状态表示为如下向量:
x = [ u , v , s , r , u ˙ , v ˙ , s ˙ ] T \mathbf{x}=[u,\ v,\ s,\ r,\dot{u},\dot{v},\dot{s}]^{T} x=[u,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









