







在上一篇博客中Frenet坐标系 or Cartesian坐标系?我们讨论了在构建自动驾驶规划问题过程中怎么选择坐标系,完成这一步后,接下来就要建立问题模型。轨迹规划问题一般都能转换成如下形式的最优控制问题(Optimal Control Problem, OCP),即在满足一定约束条件下,寻找一个控制策略,使得系统的性能指标(或成本函数)达到最优。
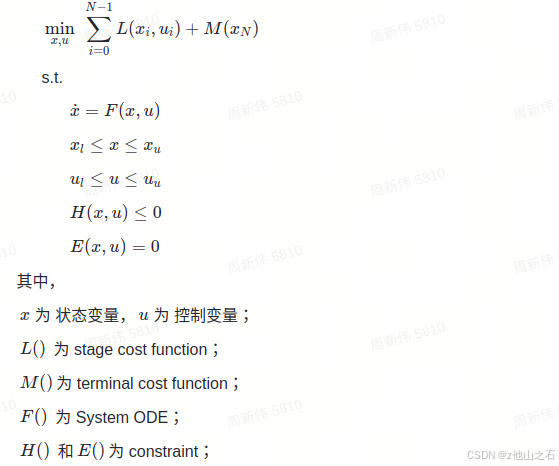
本文主要讨论系统模型,也就是确定状态变量和控制变量,并据此建立状态方程,这个直接决定问题的复杂度以及解对现实的模拟程度。
关于状态/控制变量的选取,有以下几点需要注意:
-
系统的状态变量,就是指能完全确定系统运动状态的最小一组变量,一个用n阶微分方程描述的系统,就有n个独立变量。对于自动驾驶的车辆系统来说,其系统模型并不唯一,这主要取决于需求,更具体的说,就是取决于目标/评价函数中所包含的物理量。一般地,如果你对最终轨迹的平滑度要求越高,你的模型就越复杂,相应地,系统阶数越高,状态变量的个数也就越多;
-
对于同一个系统,状态变量的选择也不是唯一的,但状态变量应该是相互独立的;
-
状态变量不一定是物理上可测量或可观测的量,但从便于控制系统的构成来说,选择那些可测量或可观察的状态变量更为合适;
-
控制变量应该是那些可以直接控制的量,在自动驾驶中,控制变量一般包括转向角度、油门开度和刹车力度;
本文总结了在对车辆等阿克曼底盘的机器人构建规划问题过程中常用的物理量及其物理关系,最后罗列几种常用的状态方
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









