







轨迹规划问题的解法综述
《从描述驾驶体感到建立车辆运动学方程》中,我们提到,轨迹规划问题通常都能转换成一个最优控制(OCP)问题,并给出了问题形式和常见的系统方程。当对该问题进行求解时,有两个部分最为困难:
1. 对碰撞约束的处理,即如何保证安全性,这部分在《自动驾驶怎么保证安全性——碰撞约束处理》中有过详细论述;
2. 处理车辆的运动学约束,保证规划出的轨迹是能够让车辆可跟踪,即可控性。如《从描述驾驶体感到建立车辆运动学方程》中所列举的车辆的运动学方程,存在三角函数,导致其都是非线性的,这是其处理困难的来源;
上述两个都是硬约束,也就是规划的轨迹必须同时满足安全性和可控性。
那工程上是怎么解决轨迹规划这个OCP问题呢?常见有两种方法,下面分别叙述。
一种解法是使用迭代线性二次调节器(iLQR),通过迭代的方式不断逼近最优解,每次迭代中需要线性化系统并求解LQR子问题,将约束以惩罚函数的形式并入评价函数中。对于原问题中非线性部分使用泰勒展开进行简化,具体来说,将系统方程采用一阶泰勒展开,评价函数展开成二阶泰勒形式。其算法原理、步骤和案例可参考《基于cilqr的纵向跟车功能》。
另一种解决轨迹规划问题的方法是直接采用数值方法,即将最优控制问题转化为优化问题,通过离散化微分方程为代数方程,然后利用优化的方法求解。其基本原理在《从约束出发:轨迹规划问题的求解及失败处理》已有阐述,下面就Apollo方案和XP方案详细阐述下工程使用案例。
Apollo轨迹规划
Apollo的规划方案 《Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform》是典型的横纵解耦方案,先进行path规划,然后在path的基础上进行speed规划。在进行path规划时,完全使用了Frenet坐标系,优化问题的状态变量为:,控制变量为
,状态方程为
![]()
变量之间的跳转关系使用了如下的piecewise-jerk method

具体表达式为
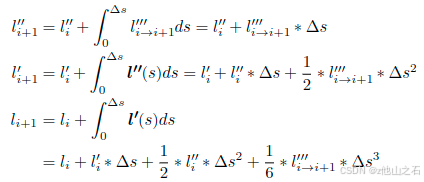
《Frenet坐标系 or Cartesian坐标系?》文章中比较了Frenet和Cartesian坐标系的优缺点,Apollo使用上述的建模方式,虽然简化了状态方程,但是将非线性部分全都放在约束部分,尤其是曲率的约束上。其处理办法也很简单粗暴,直接进行线性化处理,所以最后构建的优化问题是个典型的二次优化问题(QP),直接使用osqp求解器进行求解。
XP轨迹规划
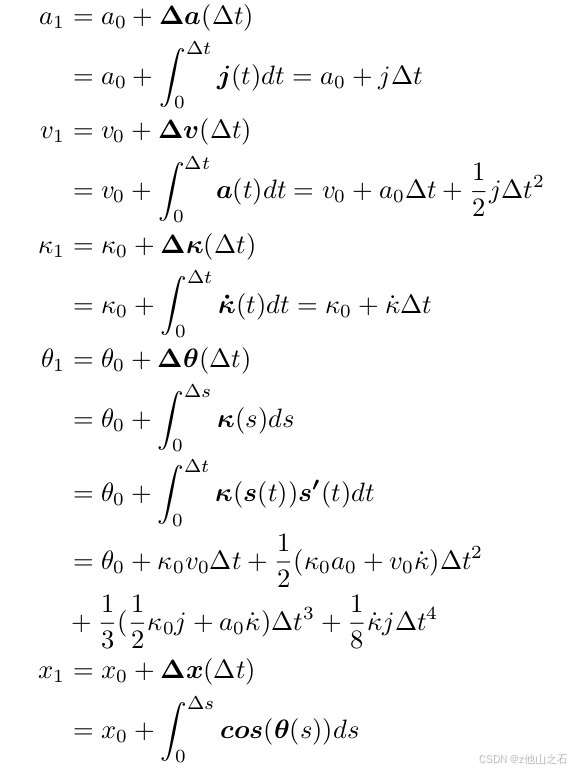
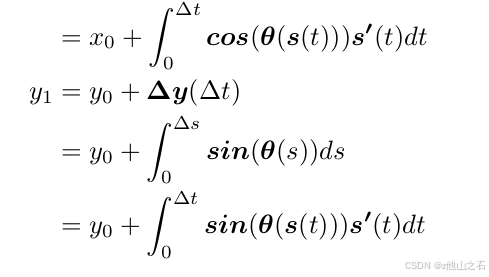
不同于Apollo的方案,XP轨迹规划方案《optimal vehicle trajectory planning for static obstacle avoidance using nonlinear optimization》是在Cartesian坐标下直接进行xy建模,建立经典的非线性优化模型,其优化变量和模型方程在 《从描述驾驶体感到建立车辆运动学方程》红中已有描述,离散化后的状态方程如下
对xy的积分表达其实没有解析解,文中采用Gaussian-Legendre quadrature近似
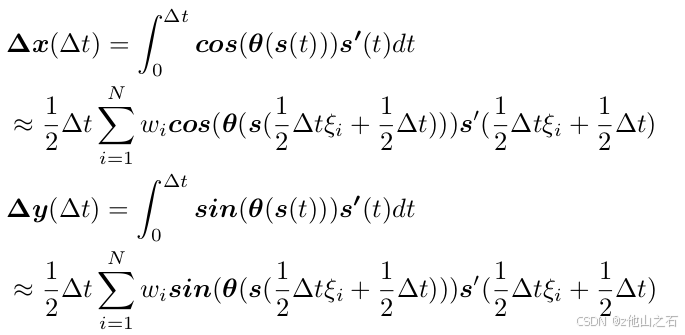
最后构建出的优化问题形式为非线性优化问题,使用了IPOPT求解器进行求解。
总结
使用数值方法解决轨迹规划问题时,优化问题的形式与所选坐标系、优化变量和近似方法息息相关,这些都直接决定了问题求解的复杂度和耗时,而耗时是自动驾驶系统中对算法的一个极为重要的指标。工程应用中需要根据场景来适当地平衡精度和复杂性之间的矛盾,在保证精度的情况下尽可能地构建简单的问题。
比较Apollo和XP的轨迹规划方案,前者使用了更简单的坐标系和更多的近似,其问题的求解也更快速更方便,在规则的道路上进行小曲率轨迹规划时,两个算法的差别可能不大,但是在大曲率的轨迹规划时,后者的效果会比前者更好。

















 2447
2447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









