内容介绍:
解释为什么一个行列式为1的正交矩阵称为旋转矩阵
一个
![]()
阶实矩阵
![]()
,如果满足
则被称为正交矩阵。正交矩阵有下面的性质
![]()
是正交矩阵当且仅当
![]()
的行(列)向量组为
![]()
的一组标准正交基。
注意:在
![]()
中,利用
,可以轻松将任意一组基转化为标准正交基。
为了解答“行列式为1的正交矩阵称为旋转矩阵”的原因,我们需要先了解下面两点。
一、矩阵是如何表示线性变换的
点击如何理解线性变换,了解线性变换与矩阵的关系。
实际上,在取定
![]()
中的标准正交基
![]()
后,每一个矩阵
![]()
都确定了
![]()
上唯一一个线性变换
![]()
, 使得对任意
二、如何理解正交矩阵的行列式为正数
考虑正交矩阵的
![]()
个列向量组成的标准正交基(单位直角坐标系),行列式为正数,代表了列(行)向量之间的相对位置关系。
2.1. 二阶正交方阵,
在如何理解二阶行列式的符号中,我们知道了如何判断一个二阶行列式的符号。一个行列式为1的二阶正交方阵
![]()
中,
![]()
逆时针旋转90度可以得到
2.2 三阶正交方阵
设3阶正交矩阵
![]()
, 则
由外积的计算方法 可以知道:
从而
![]()
在三维空间中构成一个右手系。
三、总结。
如果把一个正交方阵
![]()
的列向量组,理解为空间中的一个单位直角坐标系。那么
![]()
意味着,
![]()
的相互位置关系,与原坐标系
![]()
-轴,
![]()
-轴,
![]()
-轴正方向的相互关系是一致的。从而,一个适当的旋转就可以让原来的坐标系变成
![]()
的列向量表示的坐标系,这恰好是这个正交矩阵所代表得线性变换。
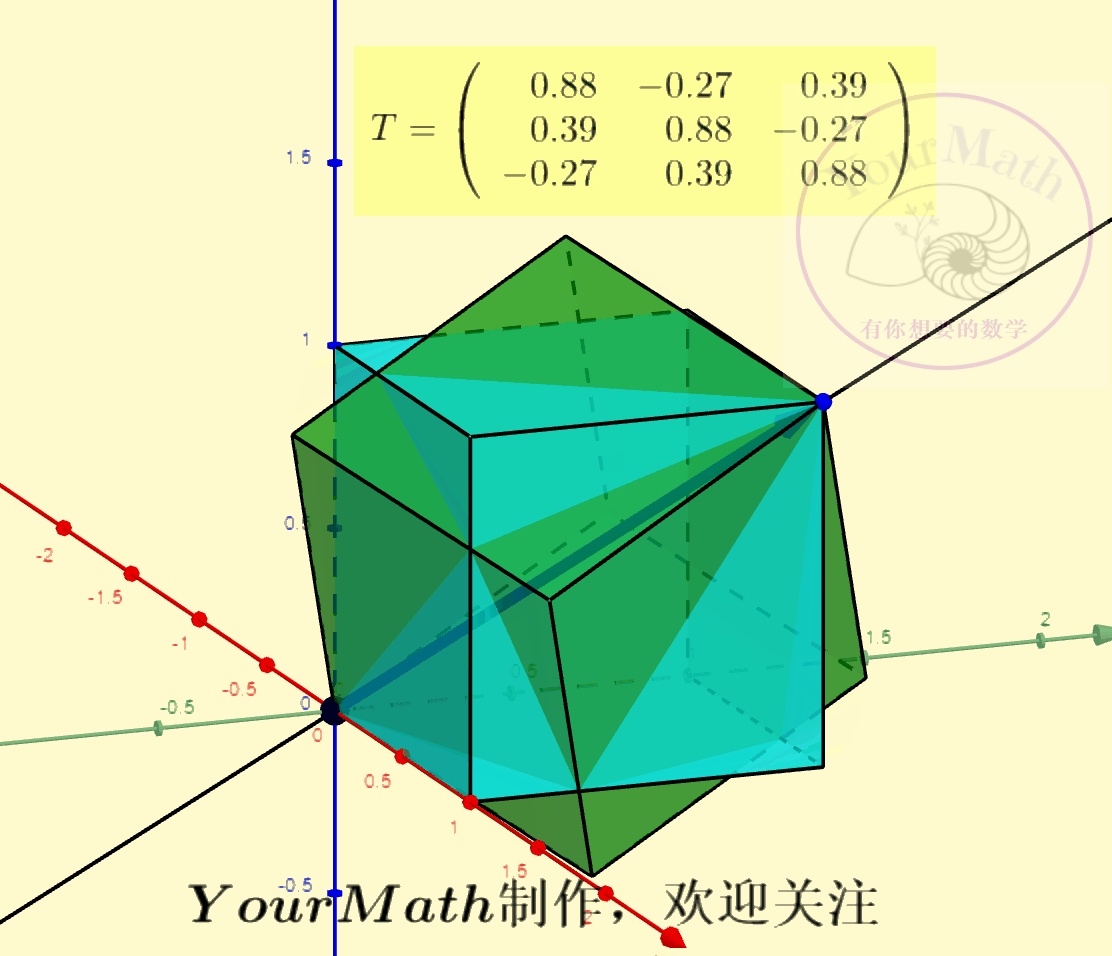
用右手系也可以轻松理解三维空间中坐标轴的旋转:
请欣赏三维空间中绕三个坐标轴的旋转的正交变换对应的正交矩阵
绕x-轴旋转绕y-轴旋转绕z-轴旋转绕某个向量旋转实际上,三维空间中的旋转变换有很多应用,比如欧拉角:欧拉角包括绕
![]()
轴,
![]()
轴和
![]()
轴的3个旋转,分别称为Pitch(俯仰),Yaw(偏航)和Roll(翻滚),如下图(图片来自网络)
更多内容大家可以自行搜素欧拉角、旋转角、或者四元数。






 博客围绕正交矩阵展开,先介绍矩阵表示线性变换,接着探讨正交矩阵行列式为正数的理解,分别分析二阶和三阶正交方阵。最后总结提到正交方阵与三维空间坐标轴旋转,还指出三维旋转变换在欧拉角等方面有诸多应用。
博客围绕正交矩阵展开,先介绍矩阵表示线性变换,接着探讨正交矩阵行列式为正数的理解,分别分析二阶和三阶正交方阵。最后总结提到正交方阵与三维空间坐标轴旋转,还指出三维旋转变换在欧拉角等方面有诸多应用。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









