









 文章介绍了MAFAT卫星视觉挑战赛,该比赛聚焦于从卫星图像中检测旋转目标,涉及多种图像条件和目标类别。比赛数据集包括带标注和无标注图像,具有多样化的场景和目标,对参赛者的模型泛化能力有高要求。比赛分为公开和私人阶段,奖金丰厚,并在CodaLab平台上以代码提交形式进行,对推理代码有特定的运行时间和资源限制。
文章介绍了MAFAT卫星视觉挑战赛,该比赛聚焦于从卫星图像中检测旋转目标,涉及多种图像条件和目标类别。比赛数据集包括带标注和无标注图像,具有多样化的场景和目标,对参赛者的模型泛化能力有高要求。比赛分为公开和私人阶段,奖金丰厚,并在CodaLab平台上以代码提交形式进行,对推理代码有特定的运行时间和资源限制。
赛事推荐|遥感目标检测最新比赛(20230221-20230427)
1. 赛题名称
MAFAT 卫星视觉挑战赛(旋转目标检测类)
2. 赛题背景
在这一挑战中,MAFAT 的 DDR&D(国防研究与发展局)希望解决从卫星图像检测物体的挑战。参与者的目标是从多样化的卫星图像中检测某些类别的物体。比赛数据集中可用的图像分辨率、向下角度(俯仰)、方向(方位角)以及拍摄日期和时间(一天中的时间和季节性)而异。这一挑战遵循 xVIEW、SpaceNet 和 DOTA 的传统,将计算机视觉应用于从太空拍摄的数量迅速增加的图像,以便更深入地了解视觉世界并满足各种重要需求。

3. 数据分析
3.1 带标注的数据集
标记的训练集包含超过 18,000 个定向边界框,跨越 13 个类别,超过 1400 帧,每帧包含 1280*1280 灰度像素。专业的注释者绘制了方框以确保准确性和一致性。帧是多种多样的,通常包含具有多个对象的复杂场景。但是,请注意,帧可能根本不包含任何对象。
3.2 无标注数据集
未标记的训练集包含 8,000 多个帧,其中添加了元数据文件但没有注释数据。
3.3 场景及目标多样
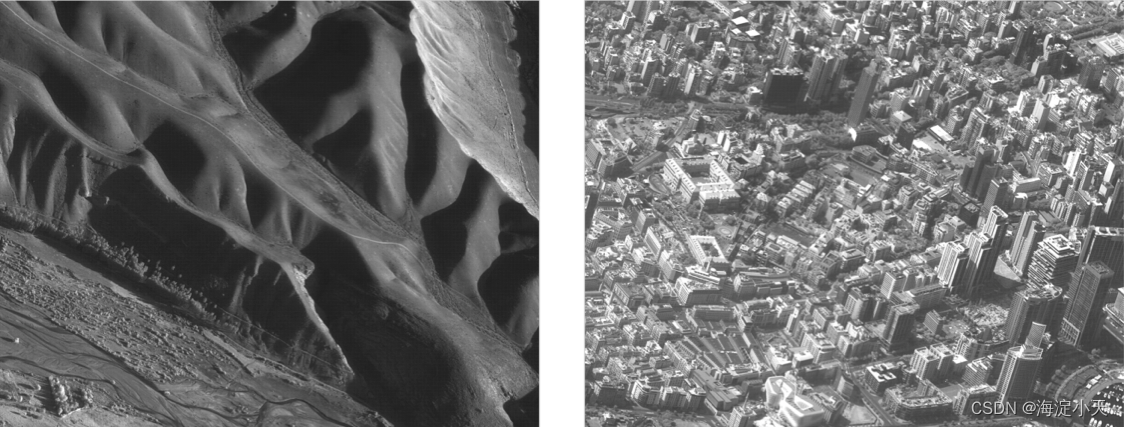
该数据集包含在一天中的不同日期和时间在各种土地类型(城市、农村、工业区、海洋等)中捕获的图像。图像在覆盖土地面积的大小、天气条件、摄影角度、照明条件和分辨率方面也有所不同。以下示例很好地说明了竞赛数据集的多样性:
-
图像分辨率在 0.4m 到 1.3m GSD(地面采样距离)之间变化。因此,同一对象的像素大小在不同的图像中会有所不同。

-
对象有各种大小,从非常大(例如大型容器)到很小(例如小型车辆)。

- 相同感兴趣区域的最低点和偏离最低点(倾斜)图像的变化。

- 在某些图像中,存在包含小而密集的物体的密集场景,而在其他图像中,存在稀疏且无人居住的场景。
3.4 数据集结构
主要数据集(带标签的训练集、公共测试集和私有测试集)包含 3 个数据文件:图像、标签和元数据。带标签的训练数据集包含 1,457 帧,作为 zip 存档占用大约 3.3 GB 的磁盘空间,未压缩时占用 3.4 GB。
3.5 文件说明
- 图像:所有具有唯一名称的图像文件,16 位灰度,tiff 格式。
- 标签:对于每个图像,都有一个带有注释的匹配文本文件。每条线代表一个对象。下面是一个对象的格式注释:x1, y1, x2, y2, x3, y3, x4, y4, class_name。
- 元数据:包含以下数据的元数据文件:‘Frame’:每个帧的唯一名称。‘AOI’:拍摄图像的感兴趣区域。‘分辨率’:帧的分辨率(以每像素厘米为单位描述的地面采样距离)。‘Sun_elevation’:太阳的天顶角(度)。‘Azimuth’:卫星的水平角(度)。‘Sun_azimuth’:太阳位置(度)的水平角(相对于北方)‘Hermetic_Small_Vehicle’:如果类“small_vehicle”在此特定框架中被密封标记,则为真/假。
4. 赛题分析
- **旋转目标!!!**与水平边界框 (HBB) 的常见注释不同,对象被注释为旋转边界框 (OBB)。这样做是为了更好地检测任意方向的物体,但是,这种方法可能与当前的大多数物体检测深度神经网络模型不兼容,不能开箱即用。
- **多种视角的影像!!!**数据集包括垂直(最低点)和倾斜(偏离最低点)图像。虽然正射卫星图像中的目标检测被广泛研究,但倾斜卫星图像中的目标检测研究较少。将两种类型的图像组合在同一数据集中提出了更大的挑战,因为每个对象类的视觉外观可能差异很大。
- **小目标!!!**数据集包含类之间和类内各种像素大小的对象,一些对象非常大(例如大容器),而另一些对象很小(例如小型车辆)。此外,由于数据集中的分辨率不同,同一对象可能出现在截然不同的像素区域。例如,小型车辆对象的像素区域可以在 8(!)像素到大约 50-60 像素之间变化。 ****
- **复杂场景!!!**数据集中的一些对象在外观上看起来相似,但只能通过它们的上下文来区分(例如容器和公共汽车)。
- **自监督或者半监督!!!**无限可能——除了标准的标记训练集外,我们还提供未标记的训练集,让参赛者有机会在他们的方法中采用无监督或半监督方法。此外,允许参赛者对测试数据进行两次传递,一次用于校准,另一次用于预测。
总之,对模型的泛化性要求较高,最好能适应域变化的一些场景。

5.双阶段比赛
比赛分为公开赛和私人赛两个阶段。
阶段 1 - 在公开阶段,要求参与者在训练集上训练他们的模型并提交他们的模型和推理代码 zip 文件。参与者的推理代码将根据公共测试集进行评估,结果将显示在排行榜上。
第 2 阶段 - 在私人阶段,每位参赛者最多可选择 2 个模型并提交给最终评审。这样做之后,代码将在私有测试集上执行,并根据最佳结果进行判断。
6. 奖金丰厚
第一名:20,000 美元
第二名:10,000 美元
第三名:6,000 美元
第四名:5,000 美元
第五名:4,000 美元
7.CodaLab 提交
比赛以代码提交形式在CodaLab平台上进行:
给参与者一个标记的训练集来训练他们的模型。这样做之后,他们被要求提交他们的代码和模型权重。测试集不会透露给参与者。相反,参与者的推理代码将根据测试集进行评估。结果将显示在排行榜上。
与传统的“result submission”格式相比,代码提交格式有两个吸引人的特点。首先,这是一个更平衡的竞争,因为所有用户都拥有相同的硬件配额,并且所有用户都无法访问实际测试数据。其次,获胜模型往往比其他竞赛中的获胜模型简单得多,因为它们必须在平台强加的计算限制内运行。
代码竞赛配置了对您可以提交的脚本的独特限制。这些可能会受到 CPU 或 GPU 运行时间、使用外部数据的能力以及互联网访问等特性的限制。要了解您必须遵守的限制条件,请查看该特定比赛的要求。
请注意以下比赛限制:
- 实例g4dn.xlarge用于运行推理代码并为其评分。
- 运行时间限制是每张图像(1280X1280 像素)乘以图像数量 2 秒,运行时间过长会导致提交错误。
- 提交文件的总大小不得超过 1 GB。
- 提交的模型必须是可重现的,因此训练时间应该合理,如果使用额外的训练数据,应该在比赛结束时可用。
代码提交格式允许使用在竞赛评估 docker 容器中定义并出现在论坛中的特定编码包。虽然,您可以在论坛上要求添加其他开源包。如果获得批准,额外的包将每周一次添加到评估泊坞窗,通常是在周四。
应该提到的是,此限制仅与推理代码有关。参赛者在训练过程中可以使用其他软件包,只要其推理代码可以在竞赛评估docker容器中执行即可。
欢迎关注公众号“遥感深度学习”,专注于“遥感+深度学习”相关信息共享,包括技术、论文、代码、竞赛等前沿资料,共同学习交流。


















 2522
2522

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









