




 本文详细解析了OpenCV中的双目标定过程,包括针孔相机模型和鱼眼相机模型,以及双目标定算法。通过stereo_calib代码解读,介绍了相机内参、畸变矫正和角点检测。最后讨论了stereoRectify函数的应用和图像校正。
本文详细解析了OpenCV中的双目标定过程,包括针孔相机模型和鱼眼相机模型,以及双目标定算法。通过stereo_calib代码解读,介绍了相机内参、畸变矫正和角点检测。最后讨论了stereoRectify函数的应用和图像校正。
主要是对opencv例程中stereo_calib代码的阅读。
opencv采用的模型公式
针孔相机模型
![]()
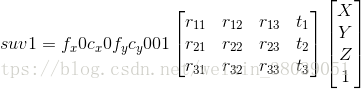
其中,X,Y,Z是世界系中的3D坐标;u,v是像素坐标系下的坐标;A是相机矩阵,包含相机内参;cx,cy是图像系的原点,通常位于图像中心;fx,fy是焦距,单位为像素单元。所以如果图像的尺度发生了变化,所有的这些参数都应当随之变化。
以上公式也可以写为:
![]()
![]()
![]()
![]()
考虑到畸变,通常指径向畸变和轻微的切向畸变:
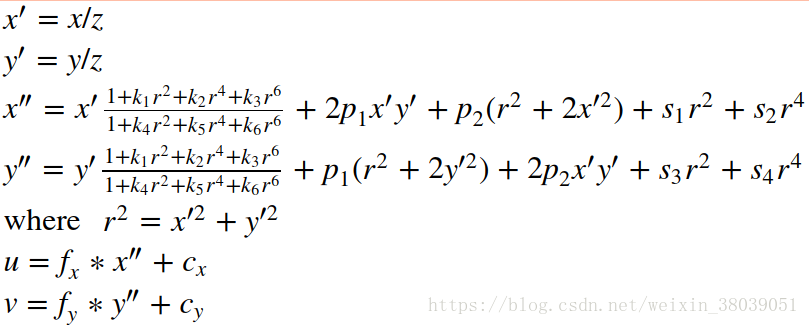
其中,k1, k2, k3, k4, k5, k6是径向畸变系数,主要由光学曲率的变化引起;p1, p2是切向畸变系数,主要由人工装配时光轴不共线引起;s1, s2, s3, s4是薄棱镜畸变系数,主要由光学镜头制造误差和成像敏感阵列的制造误差引起。
鱼眼相机模型
X是世界系下点的三维坐标,其在相机系下的坐标是
Xc = R X + T
R是旋转矩阵。鱼眼畸变:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 947
947

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









