







VINS-FUSION 源码 双目 单线程 按执行顺序阅读
Keywords :
VINS-FUSION vins 源码解读 源码梳理 vins数据结构 vinsfusion vins双目
双目vins 双目vinsfusion 双目vins_fusion vins fusion结构梳理
vins_fusion结构梳理 vins源码 vinsfusion源码 vins纯双目 vinsfusion纯双目 vins-fusion广角双目 vins-fusion代码解读 vins-fusion代码梳理
- 概述
本文依照代码(双目不含imu,只开单线程)执行顺序写成,内容为主要代码加注释的方式,个别会有文字说明,VINS-FUSION开源代码地址为:
https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
错的地方欢迎指正
转载注明来源 - by.十里桃园
吐槽下小觅,只会在知乎抖机灵卖产品,真正的干货基本没,抖机灵抖得多了就很烦了。
再吐槽下vins。vslam的前端在光流法,以至于此算法的天花板颇低。
有两个先天弱点:1,特征点无描述,导致无法用某一帧定位在全图的位置 2,用LK光流跟踪,转弯废
-
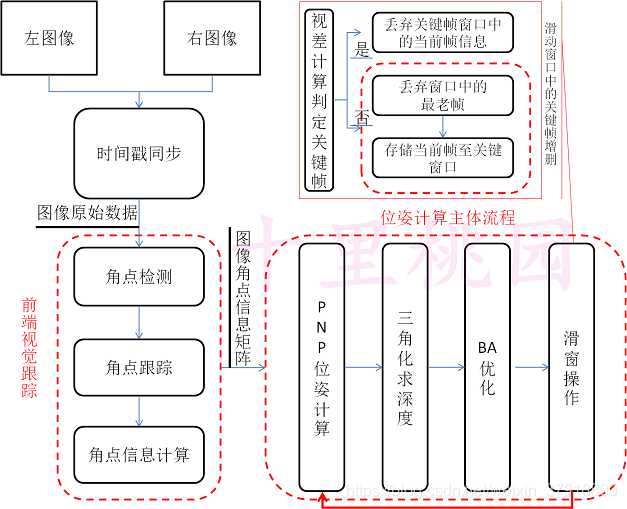
程序流程图(不含回环检测)
程序位姿计算主要分为两个模块,暂不包含回环检测模块:
1,前端视觉跟踪及角点信息计算
2,位姿计算模块
- 程序入口:
程序入口:VINS-Fusion/vins-estimator/src/rosNodeTest.cpp
- 3.1 estimator 类初始化
rosNodeTest.cpp:
Estimator estimator;
Estimator.cpp:
Estimator::Estimator(): f_manager{Rs}
{
ROS_INFO("init begins");
initThreadFlag = false; // 是否初始化线程 false则表示还未初始化线程数
clearState();//清除了状态,为诸多变量赋初值
}
- 3.2数据队列queue初始化
rosNodeTest.cpp:
queue<sensor_msgs::PointCloudConstPtr>
feature_buf;//存储feature
queue<sensor_msgs::ImageConstPtr>
img0_buf;//存储image0 左侧图像
queue<sensor_msgs::ImageConstPtr>
img1_buf;//存储image1 左侧图像
- 3.3 main函数
rosNodeTest.cpp:
readParameters(config_file);
estimator.setParameter();//读取并配置文件参数
ros::Subscriber
sub_feature = n.subscribe("/feature_tracker/feature", 2000, feature_callback);//源数据为特征点
ros::Subscriber
sub_img0 = n.subscribe(IMAGE0_TOPIC, 100, img0_callback);//左侧图像
ros::Subscriber
sub_img1 = n.subscribe(IMAGE1_TOPIC, 100, img1_callback);//右侧图像
ros::Subscriber sub_restart = n.subscribe("/vins_restart", 100,
restart_callback); //restart
void restart_callback(const std_msgs::BoolConstPtr &restart_msg)
{
if (restart_msg->data
== true)
{
ROS_WARN("restart the estimator!");
estimator.clearState();//清除状态 赋初始值
estimator.setParameter();//根据配置文件赋值
}
return;
}
std::thread sync_thread{sync_process};//入口
main函数为程序入口程序,值得注意的是sync_process为程序入口。
- 接受源图像数据及处理接口
接受源图像数据定义在synv_process函数中,并送入estimator进行位姿估计和后续运算。其接受图像代码块如下:
rosNodeTest.cpp:
double time0 =
img0_buf.front()->header.stamp.toSec();
double time1 =
img1_buf.front()->header.stamp.toSec();
// 0.003s sync tolerance 双摄像头同步 阈值0.003
if(time0 < time1 - 0.003)
{
img0_buf.pop();
printf("throw img0\n");
}
else if(time0 > time1 + 0.003)
{
img1_buf.pop();
printf("throw img1\n");
}//双摄像头同步 购买的摄像头已经做了同步 ros消息时间戳完全相同
else
{
time =
img0_buf.front()->header.stamp.toSec();
header =
img0_buf.front()->header;
image0 =
getImageFromMsg(img0_buf.front());//接收到的左图像 1通道
img0_buf.pop();
image1 =
getImageFromMsg(img1_buf.front());//接收到的右图像 1通道
img1_buf.pop();
//printf("find img0 and img1\n");
}
在接受到源图像之后,送入estimator:
rosNodeTest.cpp:
if(!image0.empty())
estimator.inputImage(time, image0,
image1);//双目图像送入estimator
- 角点检测和视觉跟踪
- 5.1 外层调用接口
VINS-FUISON调用的OPENCV的角点检测和光流法跟踪函数,其外层调用接口如下:
estimator.cpp:
Estimator::inputImage()
map<int, vector<pair<int, Eigen::Matrix<double, 7,
1>>>> featureFrame;//map 里面的pair为 <int, Eigen::Matrix<double, 7, 1>>类型 存储featureFrame map
if(_img1.empty())
featureFrame =
featureTracker.trackImage(t, _img);//角点检测和跟踪 单目
else
featureFrame = featureTracker.trackImage(t, _img, _img1);//角点检测和跟踪 双目
if (SHOW_TRACK)//是否发布TrackImage话题 RVIZ里面的 track_image窗口
{
cv::Mat imgTrack =
featureTracker.getTrackImage();
//featureTracker.showUndistortion();//显示去畸变的图像,dataset可以正常显示 ,摄像头有黑白间隔异常
pubTrackImage(imgTrack, t);
}
- 5.2 角点检测
VINS-FUSION采用的为Shi-Tomasi角点。
feature_tracker.cpp:
FeatureTracker::setMask ()
cv::circle(mask, it.second.first, MIN_DIST,
0, -1);//把特征点周围MIN_DIST的点设置为0
feature_tracker.cpp:
FeatureTracker::trackImage()
cv::goodFeaturesToTrack(cur_img,
n_pts, MAX_CNT - cur_pts.size(), 0.01, MIN_DIST, mask);
//cur_img
当前输入的单通道图像;
//n_pts 输出的被提取的角点坐标;
//MAX_CNT为设置的最大角点个数程序中会按照角点强度降序排序,超过MAX_CNT的角点将被舍弃;
//0.01为角点强度的阈值系数,若检测出所有角点中的最大强度是max,那么强度值小于max*qualityLevel的角点被舍弃
//MIN_DIST为角点与其邻域强角点之间的欧式距离,与邻域强角点距离小于minDistance的角点将被舍弃;
//mask : 感兴趣区域,
- 5.3 光流法跟踪
VINS-FUSION采用基于角点特征的金字塔LK光流跟踪算法。VINS所定义的跟踪包含两种模式:前后帧跟踪、左右帧间跟踪
前后帧跟踪,以前帧为基础,跟踪当前帧:
feature_tracker.cpp:
FeatureTracker::trackImage()
cv::calcOpticalFlowPyrLK(prev_img,
cur_img, prev_pts, cur_pts, status, err, cv::Size(21, 21), 3);
//输入:prev_img 第一张图像
cur_img: 当前图像
prev_pts第一张图像中的点
//输出
nextPts 当前图像的点
//金字塔三层
if(FLOW_BACK)// 反向的光流跟踪,通过上一帧跟踪到的点,反向跟踪回去,差异大的点剔除。 默认打开->bot.yaml
{
vector<uchar> reverse_status;
vector<cv::Point2f>
reverse_pts = prev_p 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 242
242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









