






1.离散线性卡尔曼滤波器推导
(1)状态传递
X(k) = AX(k-1) + BU(k) + v
A为传递矩阵,B为输入控制矩阵, v为均值为0,方差为Q的系统噪声,X为估计状态,X(k)协方差为P(k),则P(k) = A*P(k-1)A’ + Q
(2)系统观测
Z(K) = z(k)+w
w为均值为0,方差为R的观测误差,z(k)为真值
(3)由预测和观测得到最优估计
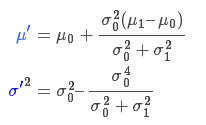
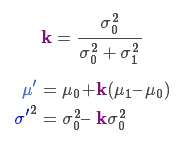
由状态估计到输出估计:Z’(k) = HX(k),H为观测矩阵,将状态转变为输出,Z’(k)服从(H(k)*X(k), HP(k)H’)的正太分布,观测值服从(z(k), R)的正太分布。最优估计分布由预测分布和观测分布相乘得到,两个正太分布的乘积仍为正太分布,新分布的均值和方差为:
设最优状态估计X_pre, 协方差P_pre
HX_pre(k) = HX(k)+k(z(k) - HX(k))
HP_pre(k)H’=HP(k)H’-kHP(k)H’
k = HP(k)H’(HP(k)H’+R)^-1
上面第一个等式左乘H^-1, 第二个等式左乘H^-1, 右乘H’^-1,得到:
X_pre(k) = X(k) + k’(z(k)-HX(k))
P_pre(k) = P(k) - k’HP(k)
k’ = P(k)H’(HP(k)H’+R)^-1
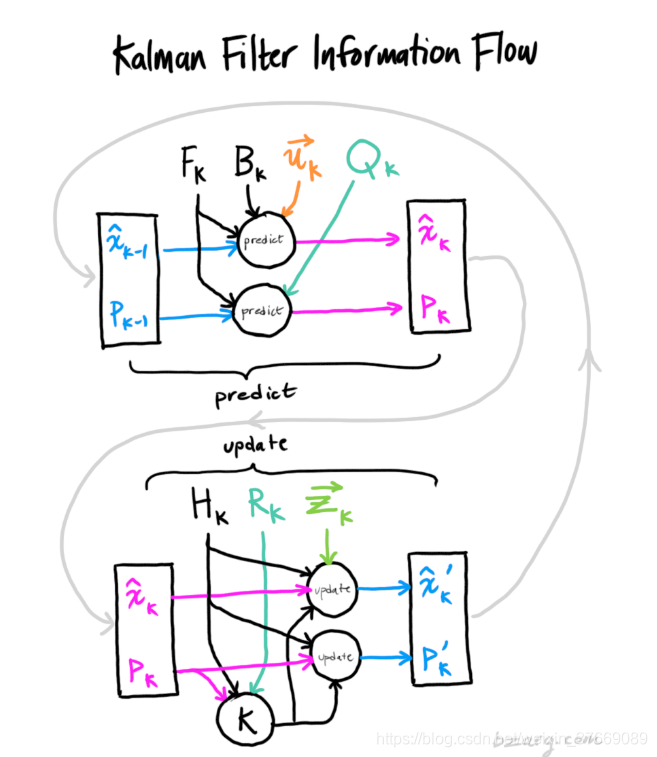
整个过程可由下图表示:
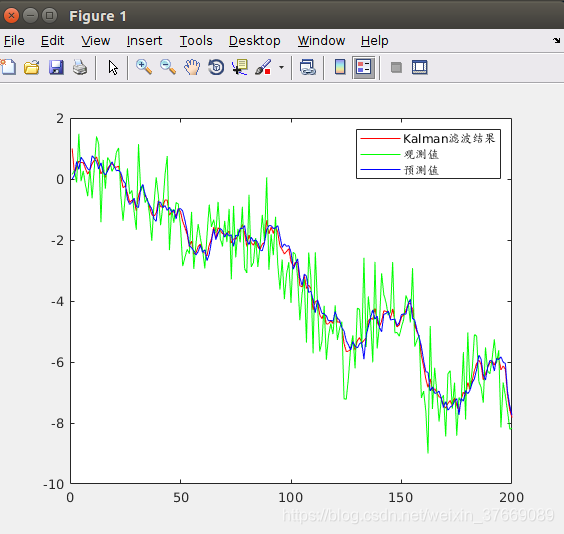
2.一维离散卡尔曼滤波matlab仿真
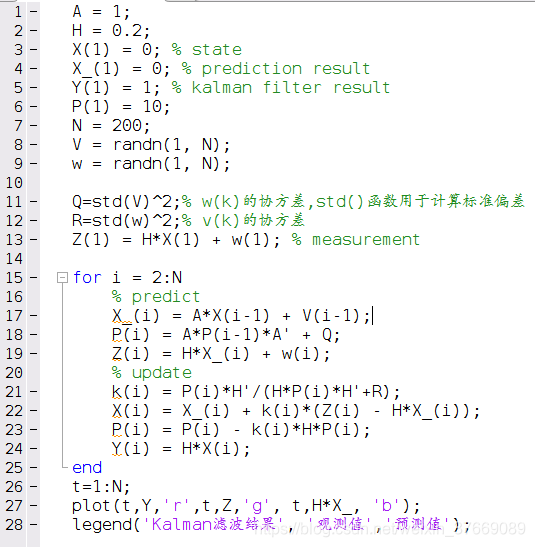
结果:

















 833
833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









