






1,Harris角点检测基本思想
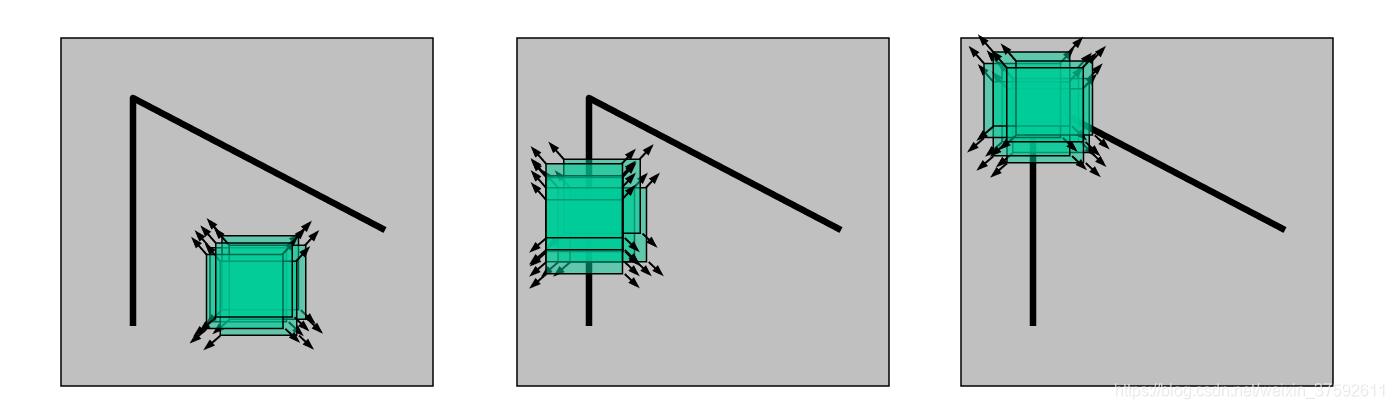
在窗口任意方向移动角点的图像灰度都会发生明显变化;边缘区域只有在左右移动时变化明显,上下移动无变化;平坦区域任意方向移动都无变化。如下图分别为平坦区域,边缘区域和角点时的变化情况
2,Harris检测数学推导
设当图像窗口平移[u,v]时产生的灰度变化 为E(U,V) ,其中W为窗口函数,I(x+u,y+v)为平移后的图像灰度,I(x,y)为原来位置的图像灰度

根据二元泰勒展开:
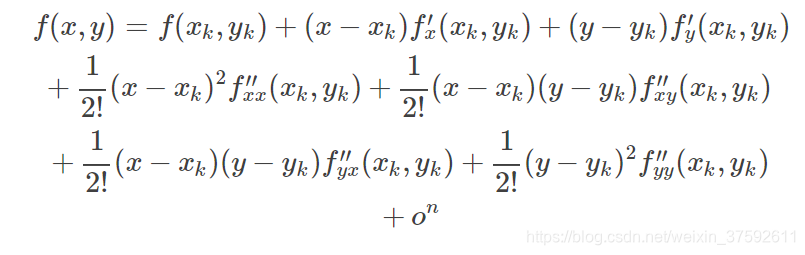
可知:
![]()
所以
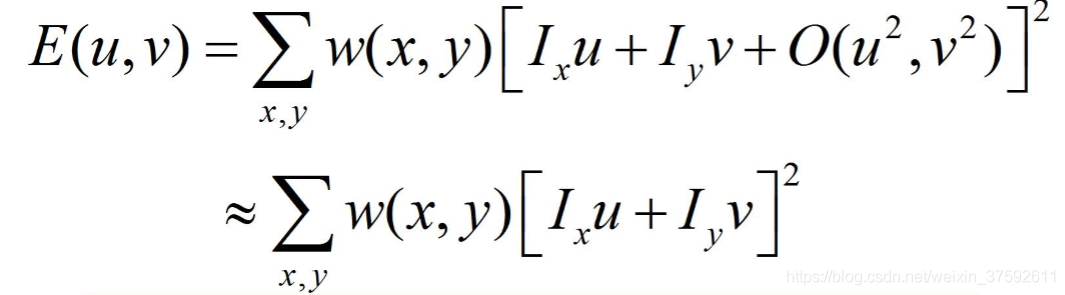
其中
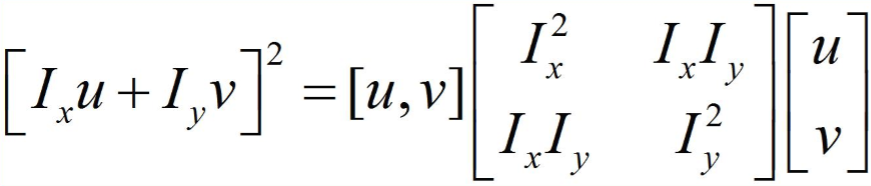
因此当移动量[u,v]取极小值时,
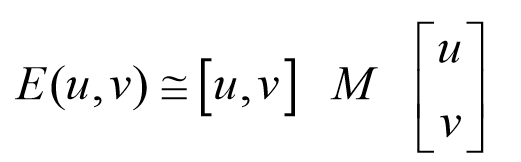
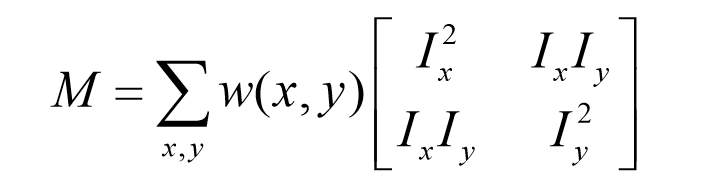
其中M是 2X2 矩阵,可由图像的导数求得:
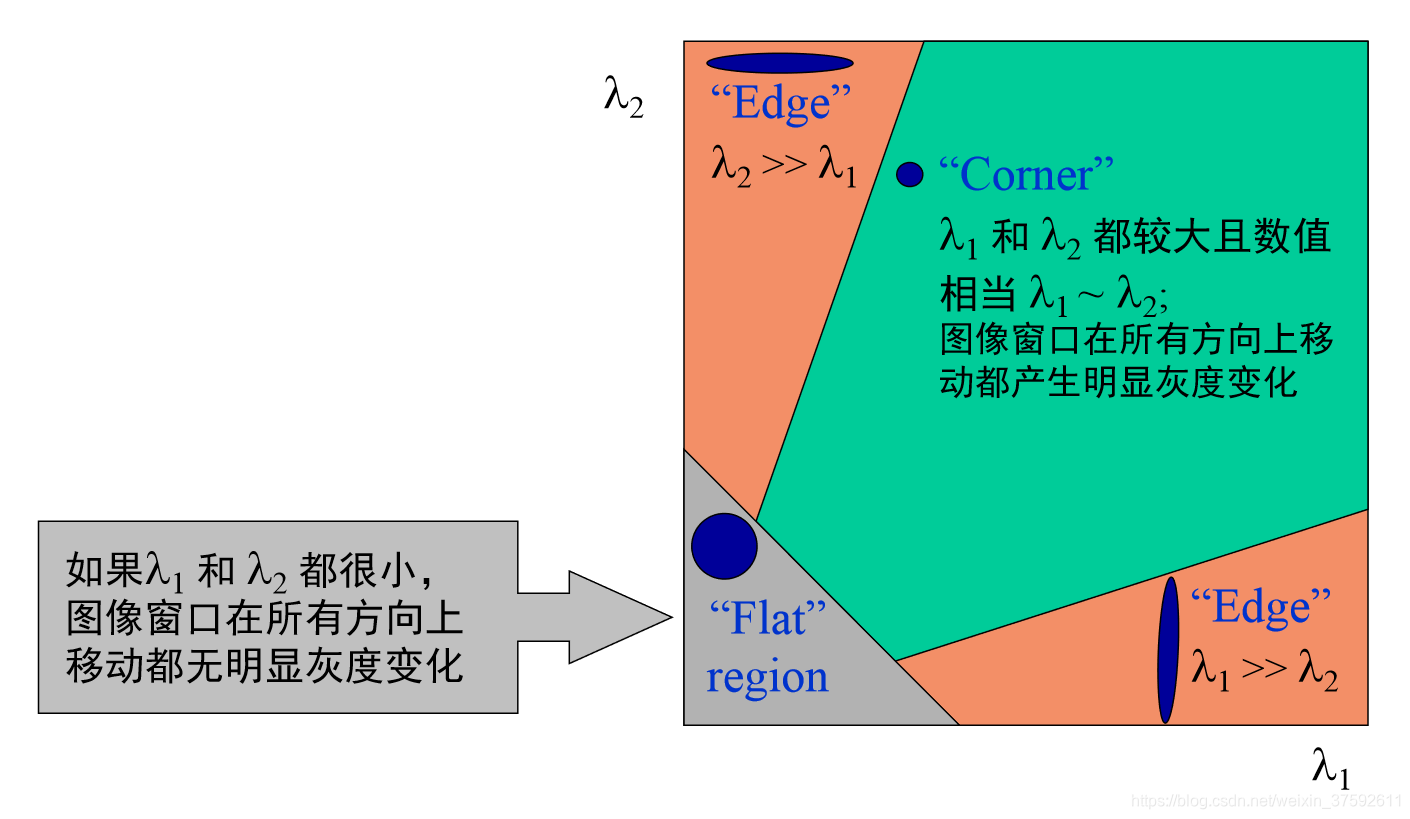
3,矩阵M分析
Harris角点检测并没有通过直接求E(u,v)的值来判断角点,而是通过对窗口内的每个像素的x方向上的梯度与y方向上的梯度进行统计分析。虽然我们利用E(u,v)来描述角点的基本思想,然而最终我们仅仅使用的是矩阵M,通过获取矩阵的两个特征值对图像进行分类 :
4,角点响应函数
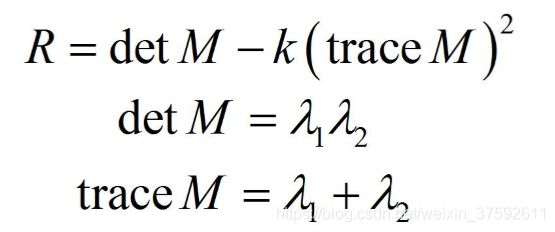
其中,R 只与M的特征值有关
角点:R 为大数值正数 •=
边缘:R为大数值负数
平坦区:R为小数值
所以可以用R判断是否是角点
5,python实现
harris.py
from scipy.ndimage import filters
from numpy import *
from pylab import *
def compute_harris_response(im, sigma=3):
imx = zeros(im.shape) # 计算导数
filters.gaussian_filter(im, (sigma, sigma), (0, 1), imx)
imy = zeros(im.shape)
filters.gaussian_filter(im, (sigma, sigma), (1, 0), imy)
Wxx = filters.gaussian_filter(imx * imx, sigma)
# 计算harris矩阵分量
Wxy = filters.gaussian_filter(imx * imy, sigma)
Wyy = filters.gaussian_filter(imy * imy, sigma)
Wdet = Wxx * Wyy - Wxy ** 2 # 计算矩阵的特征值和迹
Wtr = Wxx + Wyy
return Wdet / Wtr
def get_harris_points(harrisim, min_dist=10, threshold=0.1):
conner_threshold = harrisim.max() * threshold
harrisim_t = (harrisim > conner_threshold) * 1
coords = array(harrisim_t.nonzero()).T
candidate_values = [harrisim[c[0], c[1]] for c in coords]
index = argsort(candidate_values)
allowed_locations = zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist, min_dist:-min_dist] = 1
filtered_coords = []
for i in index:
if allowed_locations[coords[i, 0], coords[i, 1]] == 1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i, 0] - min_dist):(coords[i, 0] + min_dist),
(coords[i, 1] - min_dist):(coords[i, 1] + min_dist)] = 0 # 此处保证min_dist*min_dist只有一个harris特征点
return filtered_coords
def plot_harris_points(image, filtered_coords):
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '+')
axis('off')
show()
testHarris.py
from PIL import Image
from numpy import *
import harris
from pylab import *
from scipy.ndimage import filters
im = array(Image.open('empire.jpg').convert('L'))
harrisim = harris.compute_harris_response(im)
filtered_coords = harris.get_harris_points(harrisim)
harris.plot_harris_points(im, filtered_coords)
实验结果

参考文章:
https://blog.youkuaiyun.com/zhouyelihua/article/details/40087045

















 671
671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









