







 本文介绍了使用PLC控制步进电机正反转和调速的实验,包括步进电机的工作原理、实训设备、控制方法。通过PLC的高速输出信号和DECO指令,实现了步进电机的正转、反转和调速控制,具体控制逻辑和梯形图程序进行了详细说明。
本文介绍了使用PLC控制步进电机正反转和调速的实验,包括步进电机的工作原理、实训设备、控制方法。通过PLC的高速输出信号和DECO指令,实现了步进电机的正转、反转和调速控制,具体控制逻辑和梯形图程序进行了详细说明。
一、实验目的
1、掌握步进电机的工作原理
2、掌握带驱动电源的步进电机的控制方法
3、掌握DECO指令实现步进电机正反转和调速控制的程序
二、实训仪器和设备
1、FX2N-48MR PLC一台
2、两相四拍带驱动电源的步进电机一套
3、正反切换开关、起停开关、增减速开关各一个
三、步进电机工作原理
步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。从图中可以看出,它分成转子和定子两部分。定子是由硅钢片叠成,定子上有六个磁极(大极),每两个相对的磁极(N、S极)组成一对。共有3对。每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相。可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推。
反应式步进电动机的动力来自于电磁力。在电磁力的作用下,转子被强行推动到最大磁导率(或者最小磁阻)的位置,如图3-1(a)所示,定子小齿与转子小齿对齐的位置,并处于平衡状态。对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1(b)所示,即定子小齿与转子小齿不对齐的位置。
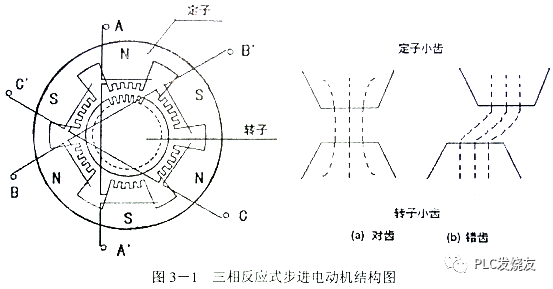
把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿。错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态。
本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转。因为中间连接的,是采用在转轴的位置用一根滑动的接触片。这样如果电磁铁转过了头,原先连接电磁铁的两根线
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3330
3330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









