







 本文介绍了考研中的算法基础知识,包括时间复杂度分析,如O(1)到O(n!)的复杂度比较,以及如何计算时间复杂度。此外,详细讲解了数据结构的基本概念,如数据元素、数据对象、数据结构的逻辑结构和物理结构,并讨论了算法的特性、设计目标及原地工作的概念。最后提到了斐波那契数列的递归与非递归实现的时间复杂度。
本文介绍了考研中的算法基础知识,包括时间复杂度分析,如O(1)到O(n!)的复杂度比较,以及如何计算时间复杂度。此外,详细讲解了数据结构的基本概念,如数据元素、数据对象、数据结构的逻辑结构和物理结构,并讨论了算法的特性、设计目标及原地工作的概念。最后提到了斐波那契数列的递归与非递归实现的时间复杂度。
语言基础
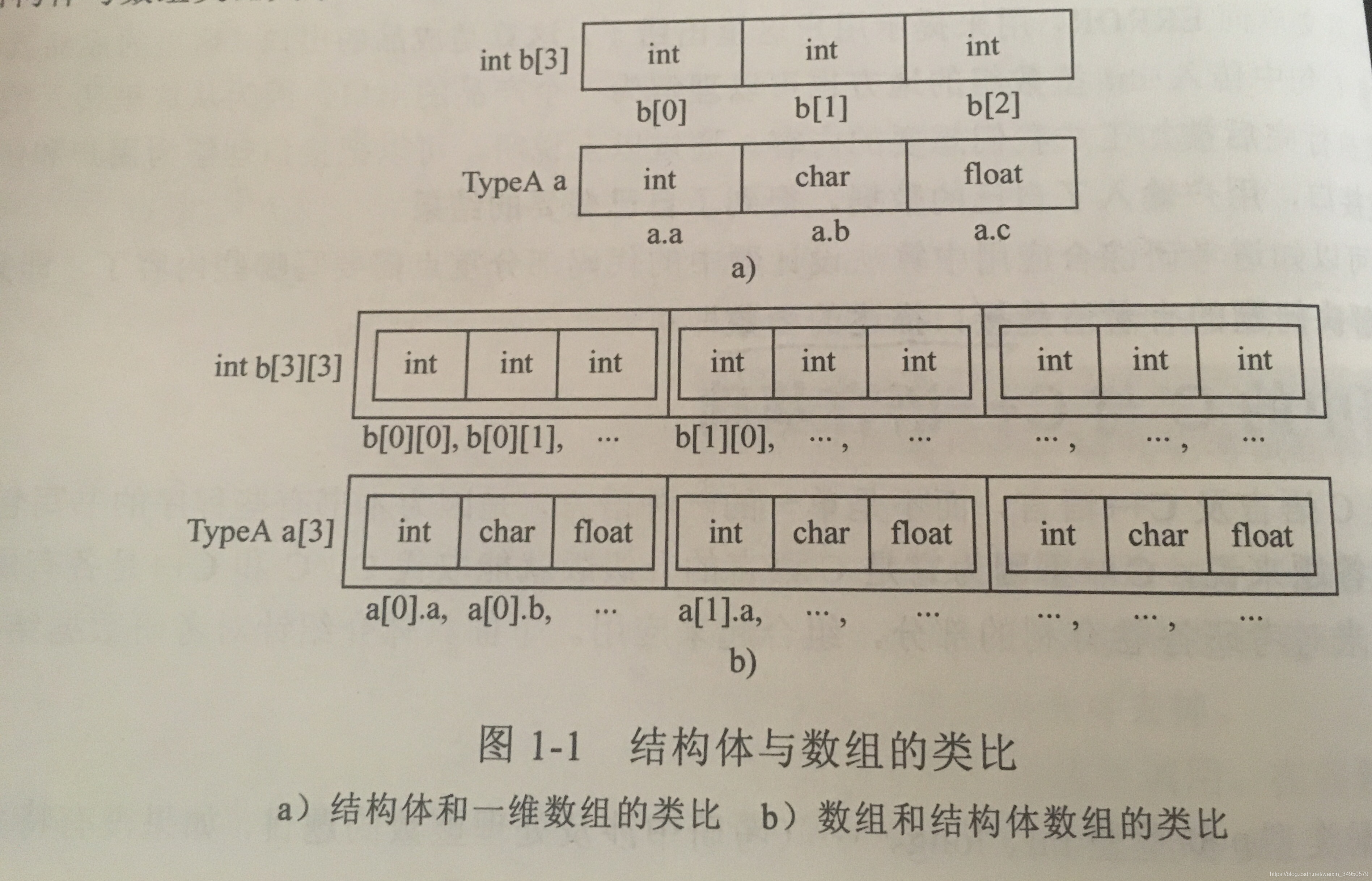
(1)结构型
int a[maxsize];
typedef struct
{
int a;
char b;
float c;
}TypeA;
(2)指针型``
int *a;
char *b;
float *c;
TypeA *d;
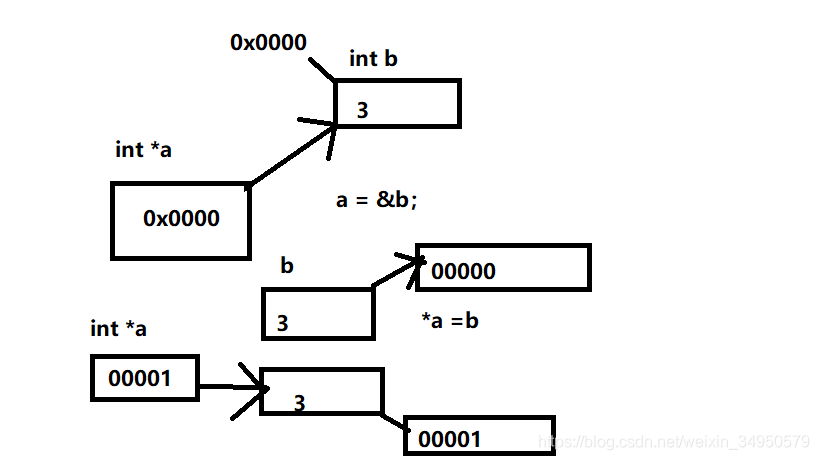
如果a是个指针型变量,且它指向了一个变量b,则a中存放变量b所在的地址。*a就是取变量b的内容(x=*a等价于x=b) &b就是取变量b的地址 a=&b 就是大家所说的a指向b
- 对比
a=&b a指向了b
*a=b a指向空间的值改成了b的值
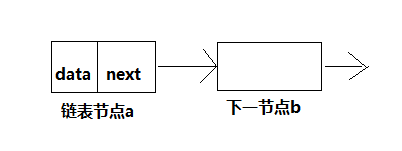
(3)节点的构造 - 链表节点的定义
typedef strut Node
{
int data;
struct Node *next; // 指向node型变量指针
}Node;
(2) 二叉树节点的定义
typedef stuct BTNode
{
int data;
struct BTNode *lchild;
struct BTNode *rchild;
}BTNode,*btnode;
BTNode *p 和 btnode p 等价
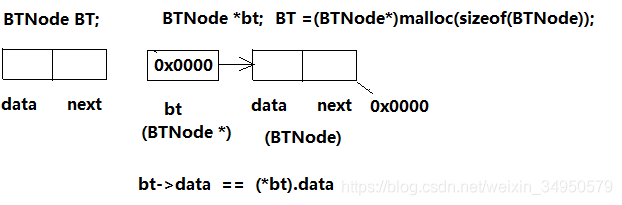
两种方法制作二叉树节点
① BTNode BT;
② BTNode *BT;
BT =(BTNode*) malloc(sizeof(BTNode));
第一种只制作了一个节点;
第二种定义节点变量指针BT,然后申请节点的内存空间,让BT指向这片内存空间,完成了节点制作。不然只是个指针,谁也没指。
第二种BT可以指向其他结点,而第一种不行。第一种BT就是某个节点的名字,一但定义好,不能脱离了
第一种赋值 x=BT.data 第二种 x=BT->data 或者(*BT).data
申请一组结点
int *p;
p =(int*) malloc(sizeof(n*int));
p指向数组中第一个元素的地址 取值和一般数组一样 比如取第二个p[1]
(4)
1)typedef 给现有数据类型起新名字
typedef int wudi;
2)#define
#define maxsize 50;
2.函数
int a;
void f(int x)
{
++x;
}
//a=0;
//f(a)=0;
void f(int &x)
{
++x;
}
//f(a)=1
void f(int *&x)
{
++x;
}
//指针型变量需要改变的写法
void f(int x[],int n)
{
...;
}
void f(int x[][maxsize],int n)
{
...;
}
void f(int x[][5],int n)
{
...;
}
int a[10][5];
int b[10][3];
f(a); //参数正确
f(b); //参数错误
//数组作为参数传入函数,函数就是对传入的数组本身进行操作,都是引用型
1.21 考研中的算法时间复杂度分析
O(1)≤O(㏒₂(n))≤O(n)≤O(n㏒₂(n))≤O(n²)≤O(n³)≤O(nk) ≤ O(2 n)≤O(n!)≤O(n n)
- 将最坏情况作为算法时间复杂度的度量
void fun(int n)
{
int i=1,j=100;
while(i<n)
{
++j;
i+=2;
}
}
第一步
1)找基本操作,一般取最深层循环内的语句所描述的操作作为基本操作
2)确定规模 由i<n可知,循环次数(基本操作执行的次数)和参数n有关,因此n就是我们的规模n
第二步
计算出f(n)
n确定以后,循环结束和i有关。i的初值为1,每次自增2,假设i自增m次后循环结束,则i最后的值为1+2m,因此有1+2m+K=n(其中K为一个常数),,用k修正1+2m,m=(n-1-k)/2,可以发现其中增长最快的项为n/2,因此时间复杂度为 T(n)=O(n)
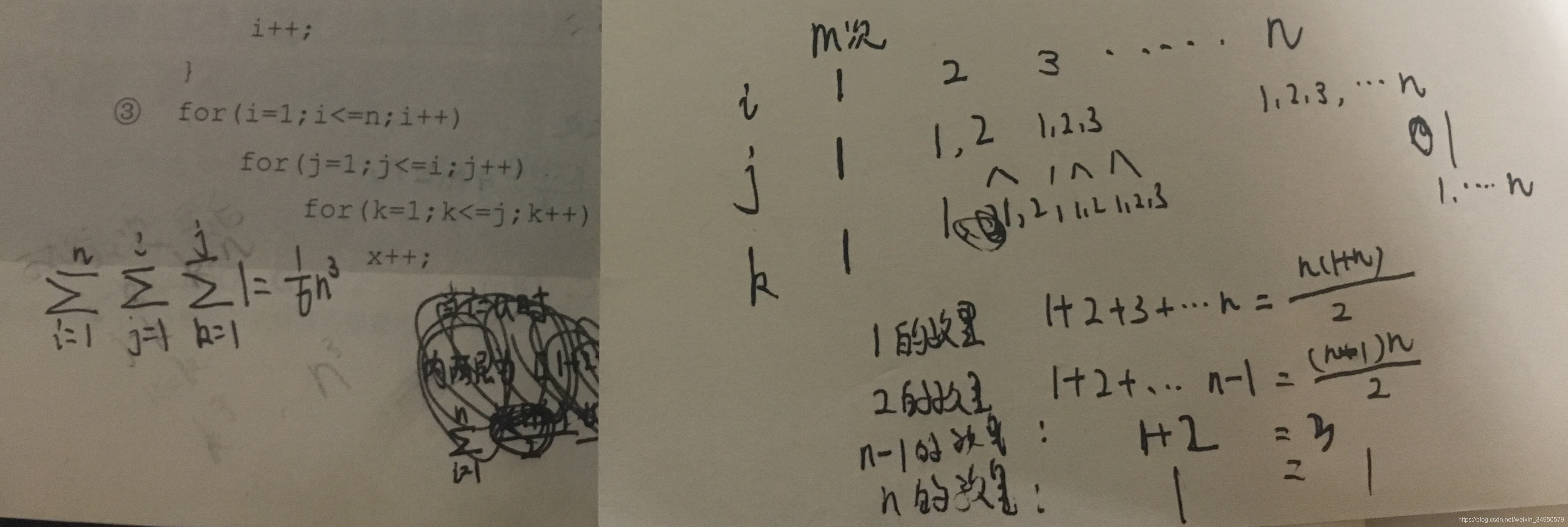
void fun(int n)
{
int i,j,x=0;
for(int i=0;i<n;++i)
for(int j=i+1;j<n;++j)
++x;
}
(n–1)+(n–2)+…+3+2+1
n(n-1)/2
T(n)=O(n2)
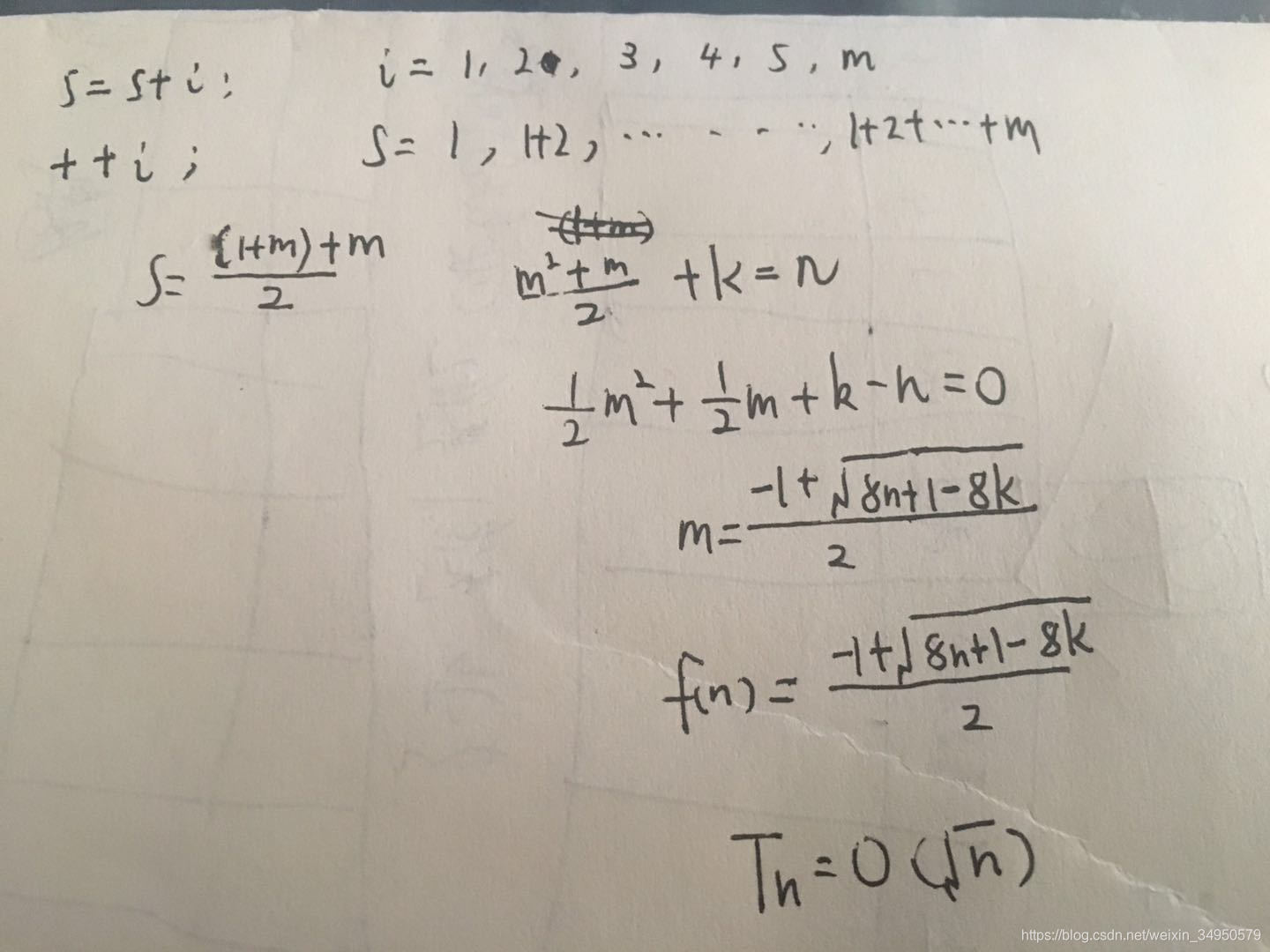
void fun(int n)
{
int i=0,s=0;
while(s<n)
{
++i;
s=s+i;
}
}
1.2.3 考研算法空间复杂度
1.3 数据结构算法基本概念
- 数据:所有输入到计算机并被程序处理的符号总称
- 数据元素:数据基本单位,若干数据项组成
- 数据项:最基本,不可分割数据单位
- 数据对象:性质相同数据元素集合
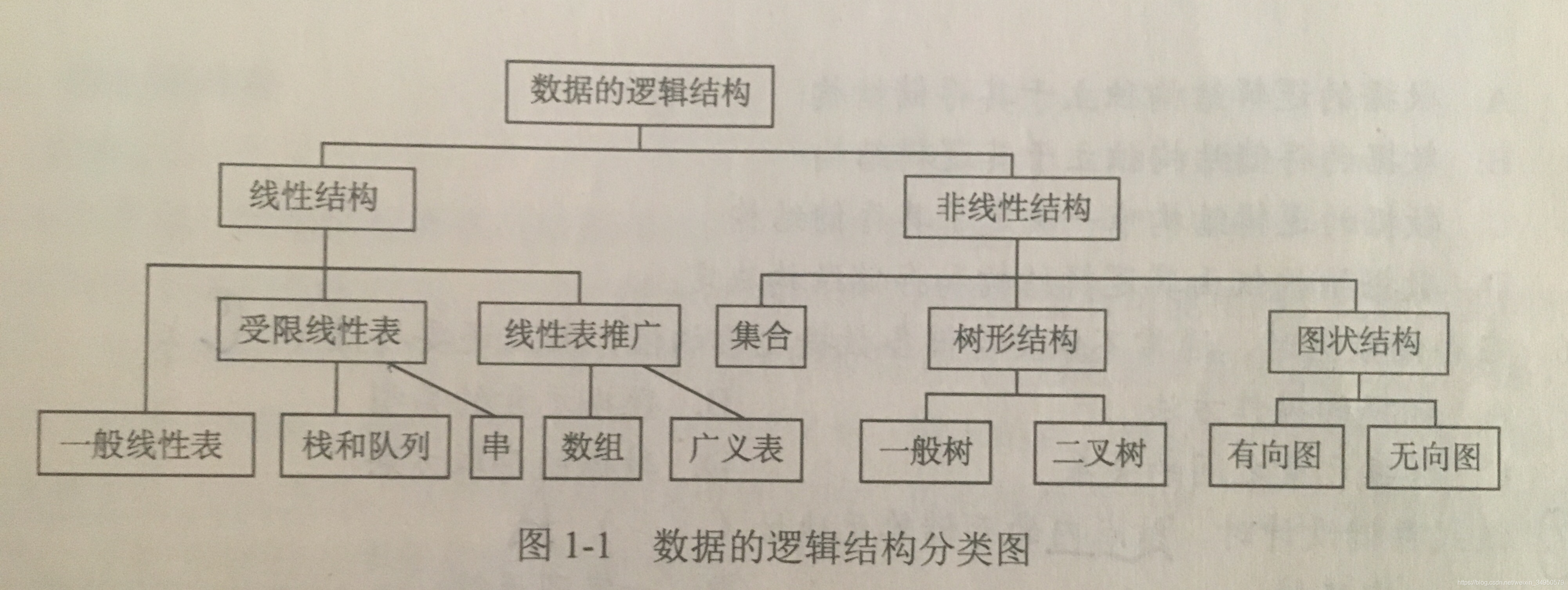
- 数据结构:存在特定关系的数据元素集合。包括逻辑结构、存储结构、数据运算。
- 数据逻辑结构:
(1)线性结构
1)唯一第一个元素
2)唯一最后一个元素
3)除最后一个,都以唯一后继
4)除第一个,都以唯一前驱
(2)非线性结构 :一对多 树和图 - 数据物理结构
物理结构又称储存结构
(1)顺序存储 : 随机存取 每个元素最少存储空间 一整块存储单元 产生较多的外部碎片
(2)链式存储 无碎片 占用额外空间 顺序存取
(3)索引存储 索引表 检索速度快 增删花费时间多
(4)散列存储 速度快 散列函数不好会冲突 增加时间和空间开销
1.3.2 算法的概念
算法特性:有穷性、确定性(每一步有确定定义)、输入、输出、可行性
设计目标:正确性、可读性、健壮性(容错,对不合理数据检查)。高效率与低存储
习题
- 算法原地工作:额外空间是常数
- 属于逻辑结构(不是物理结构):就是有多种物理存储方式
- 链式存储设计,结点内存储地址连续
- 长度m和n的升序链表,合并为长度m+n的降序链表,时间复杂度O(max(m,n))
- 如下函数mergesort()执行时间复杂度为多少?假设函数调用被写为mergesort(1,n),函数merge时间复杂度为O(n)
void mergesort(int i,int j)
{
int m;
if(i!=j)
{
m=(i+j)/2;
mergesort(i,m);
mergesort(m+1,j);
merge(i,j,m);
}
}
1.显然规模为n,基本操作是merge(),复杂度O(n),merge内基本操作设为cn,函数mergesort()基本操作次数为f(n),则有
f(n)=2f(n/2)+cn;
=22f(n/4)+2cn 2 x(2xf(n/4)+cn x 1/2)+cn
=23f(n/8)+3cn (22) x(2xf(n/8)+cn x 1/4)+2cn
=2kf(n/2k)+kcn
由函数 mergesort()可知 f(1)=c x 1=c;
由n=2k -> (k=log2n) 带入最后一式 f(n)=nc+log2ncn
f(n)=cn+cnlog2n
1.一个算法所需时间由下述递归方程表示,试求出该算法的时间复杂度的级别。
T(n)= 1 若n=1
2T(n/2)+n 若n>1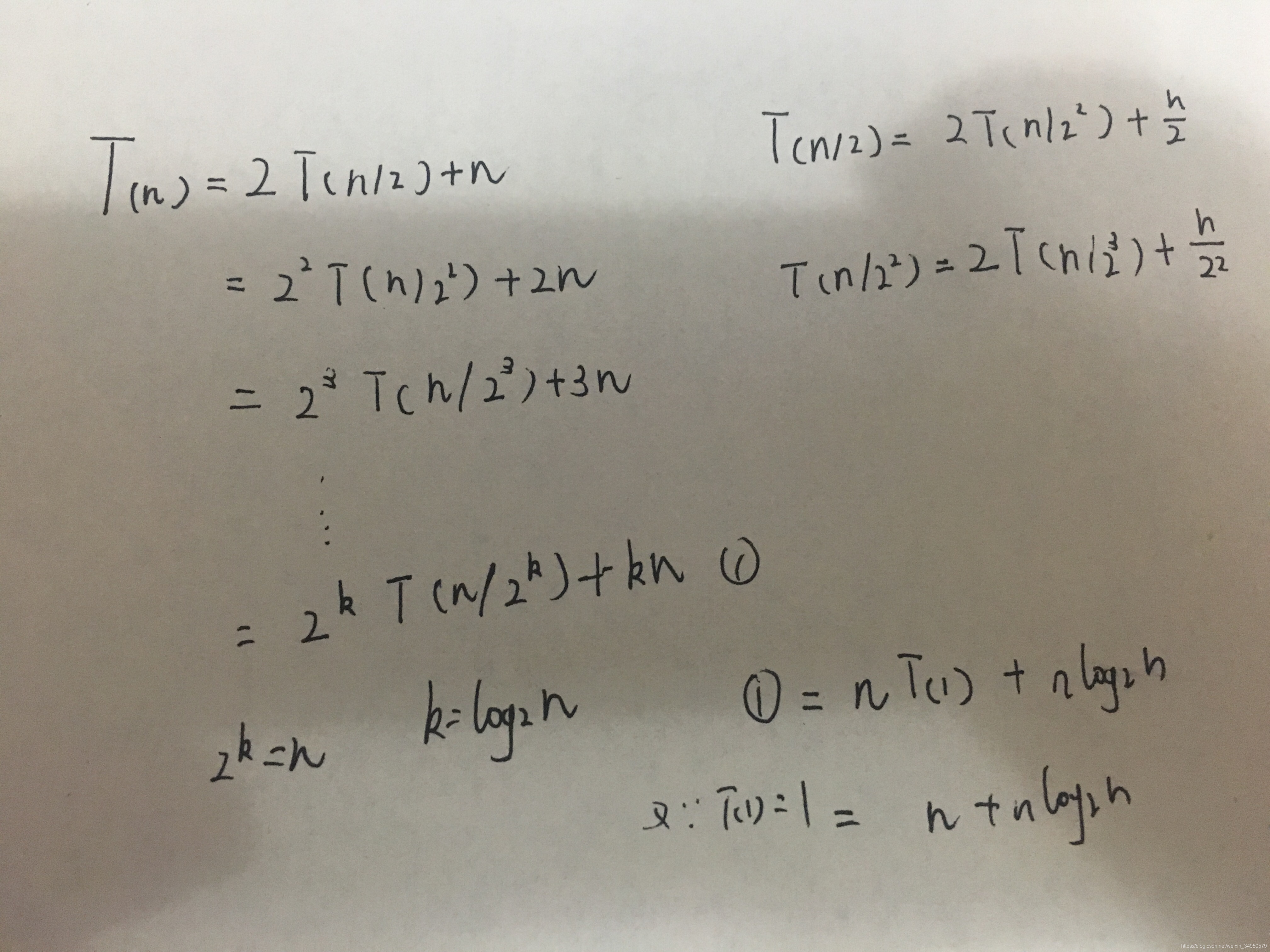
求解斐波那契数列递归和非递归
F(n) = 1 n=0,1
F(n-1)+F(n-2) n>1
.递归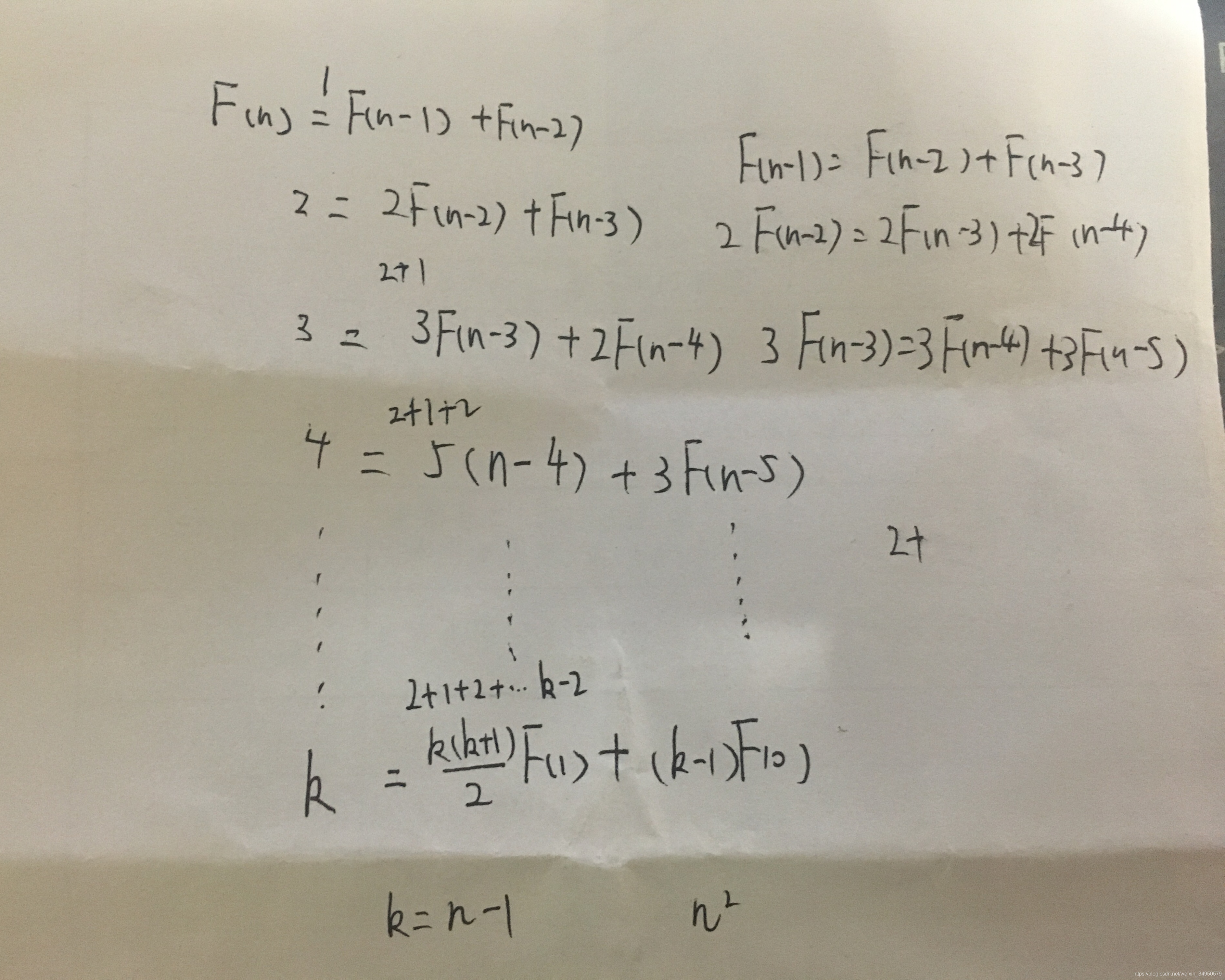
非递归
#include<iostream>
using namespace std;
long Fibonacci(int n) {
if (n <= 2)
return 1;
else {
long num1 = 1;
long num2 = 1;
for (int i = 2;i < n - 1;i++) {
num2 = num1 + num2;
num1 = num2 - num1;
}
return num1 + num2;
}
}
int main() {
cout << "Enter an integer number:" << endl;
int N;
cin >> N;
cout << Fibonacci(N) << endl;
system("pause");
return 0;
}
从n(>2)开始计算,用F(n-1)和F(n-2)两个数相加求出结果,这样就避免了大量的重复计算,它的效率比递归算法快得多,算法的时间复杂度与n成正比,即算法的时间复杂度为O(n)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









