






 本文详细介绍了ROS的安装、配置与测试过程。包括软件中心配置、添加源、设置秘钥,安装至尊豪华全功能版ROS,还需初始化rosdep和环境变量、安装常用插件。最后介绍了测试ROS及启动RVIZ的步骤,并给出参考引用文档。
本文详细介绍了ROS的安装、配置与测试过程。包括软件中心配置、添加源、设置秘钥,安装至尊豪华全功能版ROS,还需初始化rosdep和环境变量、安装常用插件。最后介绍了测试ROS及启动RVIZ的步骤,并给出参考引用文档。
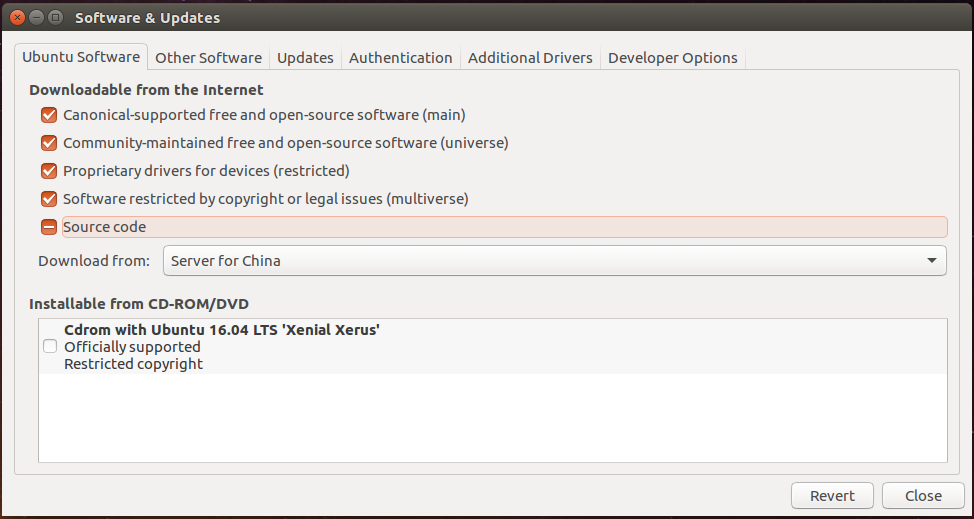
1、软件中心配置
首先打开软件和更新对话框,打开后按照下图进行配置(确保你的"restricted", "universe," 和 "multiverse."前是打上勾的):
2、添加源
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
3、安装ROS
首先确保系统软件处于最新版
$ sudo apt-get update
然后我们就可以安装 ROS 啦,但是问题又出现了,ROS kinetic 也有很多版本,比如工业版,基础版,高级版,豪华版,至尊豪华...
既然我们想要学习ROS,那就安装至尊豪华全功能版吧,指令如下:
$ sudo apt-get install ros-kinetic-desktop-full
安装完成后,可以用下面的命令来查看可使用的包:
$ apt-cache search ros-kinetic
到现在,虽然是安装完了,但是还不能用ROS , 需要做一下设置:
(1)需要先初始化 rosdep
$ sudo rosdep init $ rosdep update
(2)然后初始化环境变量:
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc $ source ~/.bashrc
上面两句非常重要,有的找不到 Package, 找不到node, 很多情况下都是没有添加source
(3)最后安装一个非常常用的插件:
$ sudo apt-get install python-rosinstall
4、测试ROS
启动ROS环境
$ roscore
看看是否显示 started core service [/rosout] 如果没问题,证明安装成功了。
5、启动RVIZ 步骤:
(1)启动 roscore
$ roscore
(2)另外打开一个控制台 输入以下命令:
$ rosrun rviz rviz
6、参考引用文档:
https://www.cnblogs.com/liu-fa/p/5779206.html
http://www.cnblogs.com/liu-fa/p/5761448.html

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









