



 本文介绍了一种通过多模态深度强化学习使机器人获得社交智能的方法。研究使用DQN训练机器人模仿人类交流,并采用灰度图和深度图双路径神经网络结构以增强学习效果。未来计划引入attention机制进一步优化。
本文介绍了一种通过多模态深度强化学习使机器人获得社交智能的方法。研究使用DQN训练机器人模仿人类交流,并采用灰度图和深度图双路径神经网络结构以增强学习效果。未来计划引入attention机制进一步优化。
1.Robot gains Social Intelligence through Multimodal Deep Reinforcement Learning
这篇文章使用DQN去训练一个机器人,使其能够模仿人类的交际。作者认为可以通过多模态学习来提高性能,作者用了灰度图和深度图分别训练两个神经网络,然后在神经网络的最后一层进行合并。训练主要分为数据产生和训练。作者希望未来工作能加入attention机制。
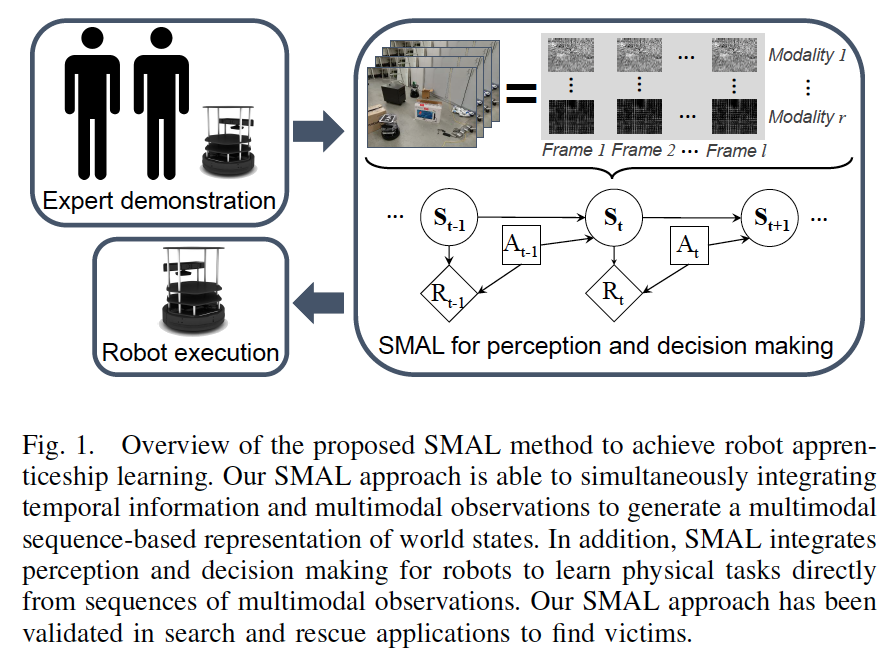
2.Sequence-based Multimodal Apprenticeship Learning For Robot Perception and Decision Making


















 1631
1631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









