 ROS Jade安装指南:从Ubuntu14.04到成功部署
ROS Jade安装指南:从Ubuntu14.04到成功部署







 本文详细介绍了ROS Jade在Ubuntu14.04系统上的安装过程,包括正确安装Ubuntu14.04、安装ROS系统、测试ROS例程等关键步骤。通过遵循指南,读者可以避免常见的安装问题,确保ROS系统顺利部署。
本文详细介绍了ROS Jade在Ubuntu14.04系统上的安装过程,包括正确安装Ubuntu14.04、安装ROS系统、测试ROS例程等关键步骤。通过遵循指南,读者可以避免常见的安装问题,确保ROS系统顺利部署。
ROS入门难,进去之后会是很简单,这是很多人的经验。但是今天安装ROS就吃了闭门羹,安装成功后,回顾发现,关键是操作系统Ubantu14.04没有安装好,一些系统包没有及时更新导致的。这里总结下ROS Jade安装的经验,留他日己用,也希望能帮助别人。安装的基本思路就是,首先安装Ubantu14.04操作,然后再安装ROS系统。
1、安装Ubantu14.04系统
ROS系统运行于Linux系统上,所以我们必须首先安装Ubantu系统。正确安装Ubantu系统是ROS安装成功的关键一步。否则安装过程中会引来许多依赖包的问题,按照文档去做也未必见得解决得了。这里特意写了一篇博文介绍如何安装Ubantu14.04系统,请参阅:Linux知识----U盘安装Ubantu14.04系统。请严格按照博文中的操作进行,对于非菜鸟,那就随意了,但我想要看的都是菜鸟吧...
2、安装ROS系统
如果步骤1安装顺利并正确,那么按照ROS安装的教程一步步的安装就可以顺利地安装了。ROS安装文档还有中文的,翻译的还非常不错,国人还是有些许皮毛的贡献的。ROS中文安装文档,请参阅:http://wiki.ros.org/cn/jade/Installation/Ubuntu。按照上面的一步步进行下去就可以了。这里需要注意的是:文档中的1.1 配置 Ubuntu 软件仓库,可以跳过,因为Ubantu默认都已经设置了这些软件仓库,只需要从1.2小节开始即可。
安装的过程会消耗一定的时间,所以建议在网络环境好的情况下进行安装,否则可能安装着半路就会网络异常中断了,Ubantu软件更新的服务器也尽量选择国内的服务器,这样可以更快的下载下来,但有些包即使在好的网络环境下,下载也会比较慢。我的安装消耗了三四个小时,晚上装,一觉醒来,一切都ok,额,五点半钟爬起来,发现安装成功,爆喜。
安装好后,可以运行那个控制小乌龟走来走去的小例程,小试牛刀看看。
3、测试ROS的例程
安装ROS成功后,在Beginner Tutorials中有一个简单的示例程序.
a、在Terminal中输入下诉命令。该命令是初始化ROS环境,全局参数,以及每个节点注册等工作。
$ roscore
b、再打开一个Terminal,输入命令。开启一个小乌龟界面。
$ rosrun turtlesim turtlesim_node
c、再打开一个Terminal,输入命令。接受键盘输入,控制小乌龟移动。
$ rosrun turtlesim turtle_teleop_key
d、选中最后打开的Terminal,键盘按下上下左右按键,可看到控制小乌龟移动。如下图所示
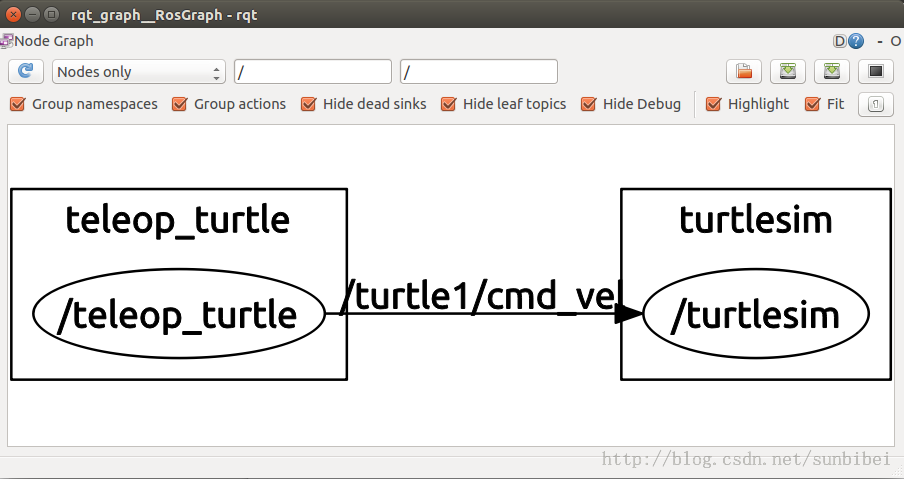
e、再打开一个Terminal,输入下诉命令,可以看到当前ROS Nodes 以及Topic等图形展示。
$ rosrun rqt_graph rqt_graph
参考资料:http://www.th7.cn/system/lin/201504/103167.shtml

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









