







 本文总结了在CAN总线通信中遇到的自发自收问题,包括地址确定、Intel与Motorola总线模式的区别、CAN总线模式设置、自发自收配置、滤波器组合、频率设置以及错误状态的判断。调试过程中强调了MOD和CMR寄存器的正确配置,以及至少需要两个网络节点才能实现成功的发送和接收。
本文总结了在CAN总线通信中遇到的自发自收问题,包括地址确定、Intel与Motorola总线模式的区别、CAN总线模式设置、自发自收配置、滤波器组合、频率设置以及错误状态的判断。调试过程中强调了MOD和CMR寄存器的正确配置,以及至少需要两个网络节点才能实现成功的发送和接收。
2011-12-02 21:59:23
流程图:
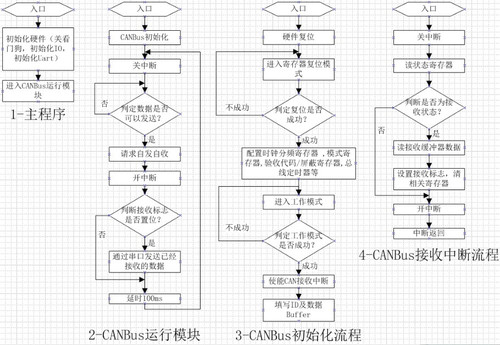
CAN自收自发问题小结
1,地址如何确定?
答:51的片外扩展地址,R/W脚的电平会根据代码自动更改,不需要设置。
参考 单片机的外部存储器的扩展.doc
2, CAN总线模式 Intel和Motorla总线区别
答:Motorla是R/W共用一个引脚,Inter是R和W引脚分开使用。
参考 intel总线与motorola总线.doc
3,CAN总线模式如何设置?
答:CAN总线模式是通过硬件引脚Mode来设置的,上电后就固定了。上电后可以通过CDC寄存器读取。
4,如何设置成自发自收?
CMR.4(SRR)置位。设置信息可被同时发送和接收。等于设置了可以自发自收。
5,单滤波与双滤波区别,如何组合?
参考文件:CAN 控制器 SJA1000 验收滤波器原理与应用.pdf
6,频率设置方法。
参考 STJ1000总线定时寄存器计算.doc
7,网络上起码要有两个
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1458
1458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









